DEWBOT VII Minibot Deployment
Analysis of Minibot deployment considerations and concepts. Updated 23 Jan 2011, Siri.
Scissors
- Initial concept for deploying the Minibot and applied to the V-bot.
- The system was to deploy transverse (to the side) and included an alignment bar with limit switches to help align the deployment system (and robot) with the tower. The alignment bar further served as a mechanical support for the scissors.
- Assembled for testing only on 20-February. Manual deployment tests indicated that this deployment method would not be reliable. Additional issues with off-axis deployment of the one or two 3/4" bore, 5" stroke pneumatic cylinders were unresolved.
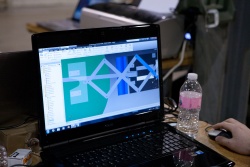
Rich Kulik designing scissors deployment in CAD

Jon Davis placing V-bot on scissors for test

Test deployment 1/5

Test deployment 3/5

Test deployment 4/5

Test deployment 5/5






Bident Forwards
On 20-Feb, the launch platform of the Scissors deployment system was adapted to a direct pneumatic deployment. A 1½" bore, 24" stroke pneumatic cylinder was used to power this deployment. In parallel, an 80/20 1010 profile deployment arm supported by 80/20 roller guides carried the launch platform. Standoffs between the roller guides and chassis frame put the deployment at the correct height.
Due to the overall llength of the deployment system, it had to be reoroented to be parallel to the robot's long axis. It was positioned off-axis to avoid interference with the arm and claw; directly over the left inner longitudinal.
A camera aiming forwards and down was to be used to assist in aligning the robot with the tower and to guide the operator in tube pickup. At the Finger Lakes Regional, the camera system did not function.
Bident Aft (Fanger)
- DB7 baby on board 110319 csm.jpg
Post-FLR deployment (in development)

Fanger lifting-off on deployment test

Fanger launch

Off-axis launch (successful)

Minibot hangar to protect minibot during the game, with camera mounted to aid alignment



