Difference between revisions of "DEWBOT XI Seneca"
MaiKangWei (talk | contribs) (→Hatboro-Horsham MAR District Event Photo Gallery) |
MaiKangWei (talk | contribs) |
||
| (18 intermediate revisions by the same user not shown) | |||
| Line 1: | Line 1: | ||
| − | Hosted by teams 1647 ([http://frc1647.org/ Iron Devils]) and 2729 ([https://sites.google.com/a/lrhsd.org/stormroboticsteam/home Storm]) at Senaca High School, Tabernacle NJ. 1640's second qualifier for the 2015 season and our 3<sup>rd</sup> time at the Seneca (a.k.a. Lenape-Seneca) MAR Qualifier. | + | {{#ev:youtube|xJsdN5Na_b4|320|right|First semifinal match}}Hosted by teams 1647 ([http://frc1647.org/ Iron Devils]) and 2729 ([https://sites.google.com/a/lrhsd.org/stormroboticsteam/home Storm]) at Senaca High School, Tabernacle NJ. 1640's second qualifier for the 2015 season and our 3<sup>rd</sup> time at the Seneca (a.k.a. Lenape-Seneca) MAR Qualifier. |
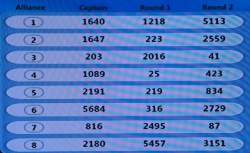
| − | ==Hatboro-Horsham MAR District Event Photo Gallery== | + | This turned out to be a very good competition for us. We finished qualifications as 1<sup>st</sup> seed and invited 1218 ([http://team1218.org/ Vulcan Robotics]) and 5113 ([http://www.mhsfirst.org/ Combustible Lemons]) to join the 1<sup>st</sup> alliance. Together, we won the event. |
| + | |||
| + | Sab-BOT-age again received the Motorola Quality Award. | ||
| + | |||
| + | The team earned 73 MAR qualifying points, bringing our total to 134. | ||
| + | |||
| + | During the competition, 1640 mentors and students assisted rookie team 5640. On Saturday, the team's mentor had to leave at noon, leaving three students on their own. Sab-BOT-age's Ryan participated in 5640's matches as human player. | ||
| + | |||
| + | By the way, this was 1640's first win as alliance captain since the 2011 Philadelphia Regional. Been a long road. | ||
| + | |||
| + | ==Robot Evolution== | ||
| + | |||
| + | The complex dual-fork lift was replaced with a simpler & lighter single fork lift, saving over 5 lb which may be applied more usefully. With this change, we bid farewell forever to the potential ability to score coopertition stacks. That's okay with us. The new lift is fitted with spring steel wedges on the bottom to correct minor tote misalignments. | ||
| + | |||
| + | The simple Intake Wheels were replaced with double-decker wheels having large, soft lower wheels and tennis ball uppers. When closed for 1<sup>st</sup> tote drop, the upper wheels serve as an ersatz ramp, making feed more reliable and eliminating tote on their sides. The upper tennis balls also stabilize the RC during transport from RC capture to the human player station and improve reliability of feed for totes following the first tote. The pointy ends of the Intake Arms were rounded. | ||
| + | |||
| + | A pair of 1/4" fiberglass poles secured to the floor and running through light-weighting holes in the lift were added to prevent tote misalignment too far aft. | ||
| + | |||
| + | ''Don't tip over'' software was employed successfully; inspired by our two tips at [[DEWBOT XI Hatboro-Horsham | Hatboro-Horsham]]. This feature utilizes gyroscope information from the Navx board. A great software solution to a mechanical problem. | ||
| + | |||
| + | ==Seneca MAR District Event Photo Gallery== | ||
<gallery widths=250 heights=250 perrow=3> | <gallery widths=250 heights=250 perrow=3> | ||
| − | Image:DB11_Seneca_150322_csm-1.jpg| | + | Image:DB11_Seneca_150321_csm-1.jpg|Pit |
| − | Image:DB11_Seneca_150322_csm-2.jpg| | + | Image:DB11_Seneca_150321_csm-2.jpg|Pit |
| + | Image:DB11_Seneca_150321_csm-3.jpg|Drive team meeting with 1647 | ||
| + | Image:DB11_Seneca_150321_csm-4.jpg|Pivot comparison with Vulcan Robotics | ||
| + | Image:DB11_Seneca_150321_csm-5.jpg|Laura Anderson (Arkema) visit to pit | ||
| + | Image:DB11_Seneca_150321_csm-6.jpg|Robot ready to roll | ||
| + | Image:DB11_Seneca_150321_csm-7.jpg|Assisting in 5640's pit | ||
| + | Image:DB11_Seneca_150322_csm-1.jpg|Don Bossi - ''FIRST'' President | ||
| + | Image:DB11_Seneca_150322_csm-2.jpg|Students talking with Judges | ||
Image:DB11_Seneca_150322_csm-3.jpg| | Image:DB11_Seneca_150322_csm-3.jpg| | ||
| − | Image:DB11_Seneca_150322_csm-4.jpg| | + | Image:DB11_Seneca_150322_csm-4.jpg|Students talking with Judges |
| − | Image:DB11_Seneca_150322_csm-5.jpg| | + | Image:DB11_Seneca_150322_csm-5.jpg|Queued |
| − | Image:DB11_Seneca_150322_csm-6.jpg| | + | Image:DB11_Seneca_150322_csm-6.jpg|Abbi & Eric carry the robot onto the field |
| − | Image:DB11_Seneca_150322_csm-8.jpg| | + | Image:DB11_Seneca_150322_csm-8.jpg|Programmers on the practice field |
| − | Image:DB11_Seneca_150322_csm-9.jpg| | + | Image:DB11_Seneca_150322_csm-9.jpg|Abbi & Eric carry the robot onto the field |
| − | Image:DB11_Seneca_150322_csm-10.jpg| | + | Image:DB11_Seneca_150322_csm-10.jpg|LuNaTeCs visit |
| − | Image:DB11_Seneca_150322_csm-11.jpg| | + | Image:DB11_Seneca_150322_csm-11.jpg|5640 on the way to the field with their new ramp |
| − | Image:DB11_Seneca_150322_csm-12.jpg| | + | Image:DB11_Seneca_150322_csm-12.jpg|Queued |
| − | Image:DB11_Seneca_150322_csm-14.jpg| | + | Image:DB11_Seneca_150322_csm-14.jpg|Staging totes in autonomous |
| − | Image:DB11_Seneca_150322_csm-15.jpg| | + | Image:DB11_Seneca_150322_csm-15.jpg|Abbi loading a tote |
| − | Image:DB11_Seneca_150322_csm-16.jpg| | + | Image:DB11_Seneca_150322_csm-16.jpg|Moving a full stack to the scoring platform |
| − | Image:DB11_Seneca_150322_csm-17.jpg| | + | Image:DB11_Seneca_150322_csm-17.jpg|Adding litter |
| − | Image:DB11_Seneca_150322_csm-19.jpg| | + | Image:DB11_Seneca_150322_csm-19.jpg|Laura & Mackenzie |
| − | Image:DB11_Seneca_150322_csm-20.jpg| | + | Image:DB11_Seneca_150322_csm-20.jpg|Dance line |
| − | Image:DB11_Seneca_150322_csm-21.jpg| | + | Image:DB11_Seneca_150322_csm-21.jpg|Dance line |
| − | Image:DB11_Seneca_150322_csm-22.jpg| | + | Image:DB11_Seneca_150322_csm-22.jpg|Eric |
| − | Image:DB11_Seneca_150322_csm-23.jpg| | + | Image:DB11_Seneca_150322_csm-23.jpg|Kevin enter the field for alliance selection |
| − | Image:DB11_Seneca_150322_csm-24.jpg| | + | Image:DB11_Seneca_150322_csm-24.jpg|First 2 of the 1<sup>st</sup> alliance |
| − | Image:DB11_Seneca_150322_csm-25.jpg| | + | Image:DB11_Seneca_150322_csm-25.jpg|Alliance line-up |
| − | Image:DB11_Seneca_150322_csm-26.jpg| | + | Image:DB11_Seneca_150322_csm-26.jpg|Nick |
| − | Image:DB11_Seneca_150322_csm-27.jpg| | + | Image:DB11_Seneca_150322_csm-27.jpg|Peer awards |
| − | Image:DB11_Seneca_150322_csm-28.jpg| | + | Image:DB11_Seneca_150322_csm-28.jpg|Abbi, Laura & Dana |
| − | Image:DB11_Seneca_150322_csm-30.jpg| | + | Image:DB11_Seneca_150322_csm-30.jpg|Kuliks |
| − | Image:DB11_Seneca_150322_csm-32.jpg| | + | Image:DB11_Seneca_150322_csm-32.jpg|Abbi loading tote |
| − | Image:DB11_Seneca_150322_csm-34.jpg| | + | Image:DB11_Seneca_150322_csm-34.jpg|Placing litter in the RC |
| − | Image:DB11_Seneca_150322_csm-35.jpg| | + | Image:DB11_Seneca_150322_csm-35.jpg|Abbi guiding robot alignment |
| − | Image:DB11_Seneca_150322_csm-37.jpg| | + | Image:DB11_Seneca_150322_csm-37.jpg|Vulcans making some rapid repairs |
| − | Image:DB11_Seneca_150322_csm-39.jpg| | + | Image:DB11_Seneca_150322_csm-39.jpg|Abbi drops a tote into the robot |
| − | Image:DB11_Seneca_150322_csm-40.jpg| | + | Image:DB11_Seneca_150322_csm-40.jpg|Larry Dodds & Laura |
| − | Image:DB11_Seneca_150322_csm-41.jpg| | + | Image:DB11_Seneca_150322_csm-41.jpg|Final handshakes |
| − | Image:DB11_Seneca_150322_csm-45.jpg| | + | Image:DB11_Seneca_150322_csm-45.jpg|Tote loading in |
| − | Image:DB11_Seneca_150322_csm-48.jpg| | + | Image:DB11_Seneca_150322_csm-48.jpg|Best stacking performance to-date |
| − | Image:DB11_Seneca_150322_csm-49.jpg| | + | Image:DB11_Seneca_150322_csm-49.jpg|Team |
| − | Image:DB11_Seneca_150322_csm-50.jpg| | + | Image:DB11_Seneca_150322_csm-50.jpg|The winning 1<sup>st</sup> alliance |
| + | Image:Seneca_2015_banner.jpg | ||
</gallery> | </gallery> | ||
| − | |||
---- | ---- | ||
[[Category:Events]][[Category:Robot]][[Category:DEWBOT XI]][[Category:Photo Galleries]] | [[Category:Events]][[Category:Robot]][[Category:DEWBOT XI]][[Category:Photo Galleries]] | ||
Latest revision as of 22:55, 20 April 2015
Hosted by teams 1647 (Iron Devils) and 2729 (Storm) at Senaca High School, Tabernacle NJ. 1640's second qualifier for the 2015 season and our 3rd time at the Seneca (a.k.a. Lenape-Seneca) MAR Qualifier.This turned out to be a very good competition for us. We finished qualifications as 1st seed and invited 1218 (Vulcan Robotics) and 5113 (Combustible Lemons) to join the 1st alliance. Together, we won the event.
Sab-BOT-age again received the Motorola Quality Award.
The team earned 73 MAR qualifying points, bringing our total to 134.
During the competition, 1640 mentors and students assisted rookie team 5640. On Saturday, the team's mentor had to leave at noon, leaving three students on their own. Sab-BOT-age's Ryan participated in 5640's matches as human player.
By the way, this was 1640's first win as alliance captain since the 2011 Philadelphia Regional. Been a long road.
Robot Evolution
The complex dual-fork lift was replaced with a simpler & lighter single fork lift, saving over 5 lb which may be applied more usefully. With this change, we bid farewell forever to the potential ability to score coopertition stacks. That's okay with us. The new lift is fitted with spring steel wedges on the bottom to correct minor tote misalignments.
The simple Intake Wheels were replaced with double-decker wheels having large, soft lower wheels and tennis ball uppers. When closed for 1st tote drop, the upper wheels serve as an ersatz ramp, making feed more reliable and eliminating tote on their sides. The upper tennis balls also stabilize the RC during transport from RC capture to the human player station and improve reliability of feed for totes following the first tote. The pointy ends of the Intake Arms were rounded.
A pair of 1/4" fiberglass poles secured to the floor and running through light-weighting holes in the lift were added to prevent tote misalignment too far aft.
Don't tip over software was employed successfully; inspired by our two tips at Hatboro-Horsham. This feature utilizes gyroscope information from the Navx board. A great software solution to a mechanical problem.
Seneca MAR District Event Photo Gallery

Pit

Pit

Drive team meeting with 1647

Pivot comparison with Vulcan Robotics

Laura Anderson (Arkema) visit to pit

Robot ready to roll

Assisting in 5640's pit

Don Bossi - FIRST President

Students talking with Judges


Students talking with Judges

Queued

Abbi & Eric carry the robot onto the field

Programmers on the practice field

Abbi & Eric carry the robot onto the field

LuNaTeCs visit

5640 on the way to the field with their new ramp

Queued

Staging totes in autonomous

Abbi loading a tote

Moving a full stack to the scoring platform

Adding litter

Laura & Mackenzie

Dance line

Dance line

Eric

Kevin enter the field for alliance selection

First 2 of the 1st alliance
Alliance line-up

Nick
Peer awards

Abbi, Laura & Dana

Kuliks

Abbi loading tote

Placing litter in the RC

Abbi guiding robot alignment

Vulcans making some rapid repairs

Abbi drops a tote into the robot

Larry Dodds & Laura

Final handshakes

Tote loading in

Best stacking performance to-date

Team

The winning 1st alliance













































