Difference between revisions of "Team 1640 2010 Summer Program"
MaiKangWei (talk | contribs) (→Objectives) |
MaiKangWei (talk | contribs) (→8-August) |
||
| (97 intermediate revisions by 4 users not shown) | |||
| Line 1: | Line 1: | ||
| + | [[Image:DB6_Paul_100711_csm.jpg|350px|right|thumb|Paul & [[DEWBOT VI]]]] | ||
==Objectives== | ==Objectives== | ||
Objectives for the 2010 Summer Program are focused on our desire to perform well at IRI. Towards this end, we are: | Objectives for the 2010 Summer Program are focused on our desire to perform well at IRI. Towards this end, we are: | ||
| Line 15: | Line 16: | ||
::* (4) 0.520" PVC Spacers cut from 1" PVC pipe (we've got miles) - thanks, Douglas & John | ::* (4) 0.520" PVC Spacers cut from 1" PVC pipe (we've got miles) - thanks, Douglas & John | ||
::* General cleaning & tread replacement. Steering sprockets pulled from pivots. | ::* General cleaning & tread replacement. Steering sprockets pulled from pivots. | ||
| − | ::* Drilled holes for Jaguar > Victor switch. We made a template first, so that holes were | + | ::* Drilled holes for Jaguar > Victor switch. We made a template first, so that holes were drilled in the correct spots. |
:Generally, pivots are in good condition excluding tread wear and carpet fiber accumulation on the transfer axle. No "broken" pivots as at [[DEWBOT VI PARC XIII | PARC]]. All steering sprockets are 0.52" above lower bearing (same as model dimension - 0.521") except Pivot #3 at 0.33" (thereby our steering chain problem). Pivot #3 steering sprocket set screws were loose (not quite finger tight). | :Generally, pivots are in good condition excluding tread wear and carpet fiber accumulation on the transfer axle. No "broken" pivots as at [[DEWBOT VI PARC XIII | PARC]]. All steering sprockets are 0.52" above lower bearing (same as model dimension - 0.521") except Pivot #3 at 0.33" (thereby our steering chain problem). Pivot #3 steering sprocket set screws were loose (not quite finger tight). | ||
:The [[media:DEWBOT_VI_Pivot_Replacement_Process.pdf | Pivot Replacement Process ]] was documented. | :The [[media:DEWBOT_VI_Pivot_Replacement_Process.pdf | Pivot Replacement Process ]] was documented. | ||
| − | :On | + | :On Wednesday, 16-June, we continued: |
::* Molly & Garrison joined us - ''welcome!'' | ::* Molly & Garrison joined us - ''welcome!'' | ||
::* Steering Jaguars replaced with Victors. All drive Jaguars are black. | ::* Steering Jaguars replaced with Victors. All drive Jaguars are black. | ||
| Line 47: | Line 48: | ||
==Possessor== | ==Possessor== | ||
| − | + | At [[DEWBOT VI PARC XIII | PARC]], [[DEWBOT VI Monty Madness | Monty Madness]] and [[DEWBOT VI Bridgewater Battle | (BR)<sup>2</sup>]], we were dissatisfied with our possessor's performance. While it seemed to perform well enough at the [[STEM Defined]] demonstration, in the heat of competition, it tends to either fail to possess the ball, or to cause or allow the robot to drive over the ball. We really could not effectively herd balls into the goal either (because of a tendency to drive over them). This was addressed for IRI. Original options included: | |
| − | : | + | :# A vacuum possessor (like Team 25's) |
| − | : | + | :# A Possessor with a low roller |
| − | + | :# Adapt the possessor to grab the ball by pinching it (without lifting it off the floor) rather than just applying a backwards spin. [In virtually all benchmarking cases, this involves a low roller/bar anyway.] | |
| − | : | + | ===Vacuum Possessor=== |
| + | :Preliminary analysis in Inventor indicates that it is feasible to accommodate a vacuum-type possessor similar to Team 25's in the DEWBOT VI chassis. The driver would have to accurately center the ball. Analysis and design were not pursued past this point. | ||
| − | + | ===Low Roller Possessor=== | |
| − | + | :We've observed that robots with effective possessors often have passive rollers at or below the ball centerpoint. Installing such a low roller on DEWBOT VI without a major redesign was not trivial. Key challenges were: | |
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | === | ||
| − | |||
| − | |||
| − | :We've observed that robots with effective possessors often have passive rollers at or below the ball centerpoint. Installing such a low roller on DEWBOT VI without a major redesign | ||
::# Avoiding interference with the kicker | ::# Avoiding interference with the kicker | ||
::# Avoiding interference with the pivots | ::# Avoiding interference with the pivots | ||
| − | ::# Maintaining our ability to cross bumps without difficulty. A low-position roller intrinsically is in the way when climbing a bump | + | ::# Maintaining our ability to cross bumps without difficulty. A low-position roller intrinsically is in the way when climbing a bump |
| − | : | + | ===Trirol Possessor Design=== |
| − | + | :A possessor was designed having an articulated, low, 3<sup>rd</sup> roller. Kicking clearance requires some non-structural kicker modification. Articulation is needed to clear the bump. For full specifications, see [[DEWBOT VI Possessor Development#Trirol Possessor Design | Trirol Possessor Design Specifications]] and [[media:Dewbot_VI_new_possessor.pdf | Detailed Drawings]].<br> | |
| − | : | + | As designed, this is a back-rolling possessor, not a pinching possessor. It could in principle be converted to a pinching possessor if the low roller bearings were removed or disabled. |
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
<gallery widths=250 heights=250 perrow=3> | <gallery widths=250 heights=250 perrow=3> | ||
| Line 96: | Line 77: | ||
Image:DB6_new_possessor_close_3.jpg|Kicker close approach to 3<sup>rd</sup> roller - 3/3 - maximum extension | Image:DB6_new_possessor_close_3.jpg|Kicker close approach to 3<sup>rd</sup> roller - 3/3 - maximum extension | ||
</gallery> | </gallery> | ||
| − | + | ====Testing==== | |
| − | === | + | :[[image:DB6_3rd_roll_prototype_100630_csm.jpg|400px|right|thumb|3rd roll prototype installed on [[DEWBOT VI]]]]At Jon Davis's suggestion, a fixed 3<sup>rd</sup> roll prototype was installed and tested on 30-June. Key observations: |
| − | :[[image:DB6_3rd_roll_prototype_100630_csm.jpg|400px|right|thumb|3rd roll prototype installed on [[DEWBOT VI]]]] | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
::* Possession performance appears unaffected by the 3<sup>rd</sup> roller - poor-to-mediocre | ::* Possession performance appears unaffected by the 3<sup>rd</sup> roller - poor-to-mediocre | ||
::* On the other hand, it is now impossible to override the ball | ::* On the other hand, it is now impossible to override the ball | ||
::* and herding now works very well, possessor on or off | ::* and herding now works very well, possessor on or off | ||
| − | :Overall, some improvement, but not what we were hoping for | + | :Overall, some small improvement, but not at all what we were hoping for. |
| − | + | :Adding friction tape to the bottom roller resulted in no observable improvement. | |
| − | : | ||
| − | :We were planning to replace the middle steel roller with fiberglass, but before installing the fiberglass rod, we tested the possessor without the middle roller. This | + | ====Hi/Lo Possessor==== |
| + | :We were planning to replace the middle steel roller with fiberglass, but before installing the fiberglass rod, we tested the possessor without the middle roller. This provided a phenomenal improvement in possessing performance. ''This Hi/Lo 2-roller possessor really works!'' With a stiff (steel, not fiberglass) and frictive Lo Bar, it's definitely a pincher. It makes no attempt to center the ball (but we're ok with that). No ball overdriving problem. Further development produced even better results. We have a Vulcan death grip (and it doesn't just convince the Romulans). The ball goes in. The robot goes forwards, backwards, sideways, slantways, longways, backways, and spinways. The ball stays in--approximately 2.75" but not more than 3", and not off the floor. It passes the ruler test, the paper test, and (most importantly) the Rizzo-the-Ref test. The only way to release the ball is to turn off/run backwards the possessor or kick. We don't even need to reduce the torque, though we can, since the vertical IR ball sensors work. The death grip doesn't visibly affect the kick range or arc (both of which are quite nice). The only way to pick up another ball is to get rid of the first--no way to possess two a once since the first on stop the top roller.<br> | ||
<gallery widths=250 heights=250 perrow=3> | <gallery widths=250 heights=250 perrow=3> | ||
Image:DB6_possessor_testing_100702_csm_1.jpg|Testing the Hi/Lo 2-roller possessor | Image:DB6_possessor_testing_100702_csm_1.jpg|Testing the Hi/Lo 2-roller possessor | ||
| − | Image:DB6_possessor_testing_100702_csm_2.jpg|Testing the Hi/Lo 2-roller possessor | + | Image:DB6_possessor_testing_100702_csm_2.jpg|Testing the Hi/Lo 2-roller possessor - ''note ball in mirror view'' |
Image:DB6_possessor_testing_100702_csm_3.jpg|The ball never leaves the floor | Image:DB6_possessor_testing_100702_csm_3.jpg|The ball never leaves the floor | ||
Image:DB6_Heather_100702_csm.jpg|Heather McKown cutting parts | Image:DB6_Heather_100702_csm.jpg|Heather McKown cutting parts | ||
| − | Image:DB6_Paul_Kenneth_Siri_DJ_100702_csm.jpg|Paul, Kenneth, Siri Maley & DJ testing the possessor | + | Image:DB6_Paul_Kenneth_Siri_DJ_100702_csm.jpg|Paul, Kenneth, Siri Maley & DJ testing the possessor (some more than others) |
| + | Image:DB6_modified_kicker_100711_csm.jpg|Modified kicker | ||
| + | Image:DB6_Maley_applying_friction_tape_100711_csm.jpg|Siri Maley applying friction tape to the lower rod | ||
| + | Image:DB6_possessing_100711_csm.jpg|Robot possessing | ||
| + | Image:DB6_whirling_dervish_100711_csm.jpg|''Whirling Dervish'' - spinning about wheelbase center - we hold on to the ball | ||
| + | Image:DB6_kicking_100711_csm.jpg|Kicking (teleop) | ||
| + | Image:DB6_possessor_right_100711_csm.jpg|Possessor mechanism detail - right | ||
| + | Image:DB6_possessor_left_100711_csm.jpg|Possessor mechanism detail -left | ||
| + | Image:DB6_front_elevation_100711_csm.jpg|Robot front elevation showing possessor (& photographer) | ||
| + | Image:DB6_paper_test_100711_csm.jpg|''We pass the paper test!'' | ||
</gallery> | </gallery> | ||
| − | === | + | ===Back to the Drawing Board (July 3 & 4) - Articulation Redesign=== |
| − | : | + | :The elimination of the middle roller made access for actuation of the low roller simpler. Narrowing the top roller is no longer necessary. A design with this change was started, then abandoned. The possessor went through two major redesigns in two days. In addition, our tests make it clear that a great deal of backwards force is applied on the low roller. The Trirol's low roller mount was not designed with this sort of force in mind. We therefore needed a more robust approach for the articulated low roller. |
| + | :After prototyping and CAD work, the final design emerged to be vertical retraction actuated by (2) 3/4" diameter x 4" stroke pneumatic cylinders. For full details, see [[DEWBOT VI Possessor Development#Back to the Drawing Board (3 & 4-July) - Articulation Redesign | Hi/Lo Vertical Retraction Details]]. | ||
| + | :The kicker still needed to be modified slightly (cut down from 15" to 13"), and the possessor system is effectively narrower. Neither of these significantly limit possessor or kicking. | ||
| + | :The excessive load on the possessor motor & drive presented some damage issues. Possible solutions pursued included: | ||
| + | ::* Limit current to the motor via a current-based feedback loop (a control/electronic solution) | ||
| + | ::* Reduced the frictional coefficient or the normal load between the possessor drive belt and either the motor pulley or the possessor tube, turning this into a ''poor man's clutch''. | ||
| + | The first option requires implementing CAN. We did switch the possessor motor from a Victor to a black Jag, but development stopped there given the complexities in adding CAN at this point. The second option proved more practical provided the final solution. Looser polycord belts (from 8% reduction to 6%) reduced the normal loads. Adding friction tape to the motor pulley (in addition to the Lo Bar) increased the pulley-belt frictional coefficient relative to the Hi Roller-belt coefficient, inducing the belt to slip only on the Hi Roller. This is also much less taxing on the polycord. | ||
:Additionally, benchmarking of other successful bottom rollers (which neither roll nor facilitate rolling) revealed an inordinate number of teams using 1/2" angle. Prototyping (with aluminum) seems to reveal why. The ball tends to roll (and thus fall out) much less than with even the misnamed bottom roller bar, and holds somewhat better in snake and much better in strafing. (Strafing is a beneficial aspect of our drivetrain could prove ''very'' helpful on defense against a certain looper bot at IRI.) The system isn't yet to death-grip standard, but I (Siri) wouldn't be overly surprised if changing the roller(s) surface(s) and/or speed (recommended at 2x robot speed) got us quite close. | :Additionally, benchmarking of other successful bottom rollers (which neither roll nor facilitate rolling) revealed an inordinate number of teams using 1/2" angle. Prototyping (with aluminum) seems to reveal why. The ball tends to roll (and thus fall out) much less than with even the misnamed bottom roller bar, and holds somewhat better in snake and much better in strafing. (Strafing is a beneficial aspect of our drivetrain could prove ''very'' helpful on defense against a certain looper bot at IRI.) The system isn't yet to death-grip standard, but I (Siri) wouldn't be overly surprised if changing the roller(s) surface(s) and/or speed (recommended at 2x robot speed) got us quite close. | ||
| − | : | + | :We appear to be having sporadic DS-robot communication malfunctions, both during bootup and randomly mid-test. It'd be great to determine the root cause(s). |
| + | |||
| + | <gallery widths=250 heights=250 perrow=3> | ||
| + | Image:DB6_Heather_bandsaw_100704_csm_1.jpg|Heather McKown preparing to cut 3" square tube on bandsaw for actuator mounting | ||
| + | Image:DB6_Heather_bandsaw_100704_csm_2.jpg|Heather McKown cutting 3" square tube on bandsaw for actuator mounting | ||
| + | Image:DB6_McKown_cad_100704_csm.jpg|Clem McKown building new possessor CAD model in Autodesk Inventor | ||
| + | Image:DB6_Heather_fabbing_actuator_mount_100704_csm.jpg|Heather McKown finishing an actuator mount on the belt sander | ||
| + | Image:DB6_Maley_lathe_100704_csm_1.jpg|Siri Maley setting the low roller into the lathe | ||
| + | Image:DB6_Maley_lathe_100704_csm_2.jpg|Siri Maley cutting low roller end to accept actuator clevis | ||
| + | Image:DB6_roller_retracted_kicker_relaxed_100705_csm.jpg|Robot with low roller retracted & kicker relaxed | ||
| + | Image:DB6_roller_extended_kicker_relaxed_100705_csm.jpg|Robot with low roller extended & kicker relaxed | ||
| + | Image:DB6_front_elevation_100705_csm.jpg|Front elevation - low roller extended & kicker relaxed | ||
| + | Image:DB6_detail_roller_extended_100705_csm.jpg|Front detail with low roller extended & kicker relaxed | ||
| + | Image:DB6_detail_roller_retracted_100705_csm.jpg|Front detail with low roller retracted & kicker relaxed | ||
| + | Image:DB6_side_elevation_100705_csm.jpg|Side elevation with low roller extended & kicker at ball contact position | ||
| + | </gallery> | ||
| + | |||
| + | ===Final Designing Photo Gallery=== | ||
| + | <gallery widths=250 heights=250 perrow=3> | ||
| + | Image:DB6_Heather_cutting_metal_100706_csm.jpg|Heather cutting possessor actuator mount | ||
| + | Image:DB6_Stumpo_turning_possessor_100706_csm.jpg|John Stumpo turning the end of the low possessor rod | ||
| + | Image:DB6_clamped_for_welding_100706_csm.jpg|Actuator mount clamped for welding | ||
| + | Image:DB6_protected for welding_100706_csm.jpg|The robot protected for welding | ||
| + | Image:DB6_mounts_welded_100706_csm.jpg|Possessor actuator mounts welded | ||
| + | Image:DB6_left_mount_100706_csm.jpg|Left actuator mount | ||
| + | Image:DB6_right_mount_100706_csm.jpg|Right actuator mount | ||
| + | Image:DB6_possessor_&_actuators_100707_csm.jpg|Possessor installed with pneumatic actuators & plumbing | ||
| + | Image:DB6_possessor_work_team_100707_csm.jpg|Possessor work team | ||
| + | Image:DB6_Matt_Heather_lathe_100710_csm.jpg|Matt & Heather McKown work the lathe | ||
| + | Image:DB6_Douglas_100710_csm.jpg|Douglas changing possessor belts | ||
| + | Image:DB6_Jen_lathe_100710_csm.jpg|Jen turning a spare possessor rod on the lathe | ||
| + | Image:DB6_Possessor_lathe_100710_csm.jpg|spare possessor rod on the lathe | ||
| + | Image:DB6_Deaver_Rizzo_Maley_100710_csm.jpg|Gary Deaver, Mike Rizzo & Siri Maley with robot | ||
| + | Image:DB6_possessing_100710_csm.jpg|robot possessing | ||
| + | </gallery> | ||
| + | |||
| + | ===Testing & Driving Practice (12-July)=== | ||
| + | We encountered several problems during driver practice & testing on 12-July. View the night's log [[DEWBOT VI Possessor Development#Meeting Logs: Hi/Lo Possessor Installation & Testing#12-July Update | here]]. In summary, we've got some practicing to do. Most of the work will focus around increasing competency with the new possessor, practicing 2 robot (thanks, DEWBOT V) interactions on defense and offense, and addressing any maintenance issues that arise (including training the pit crew). | ||
| + | <gallery widths=250 heights=250 perrow=3> | ||
| + | Image:DB6_drive_teams_100712_csm.jpg|Drive teams at practice | ||
| + | Image:DB6_Nichole_Jack_100712_csm.jpg|Nicole & Jack | ||
| + | Image:DB6_Kenneth_Ben_100712_csm.jpg|Kenneth & Ben | ||
| + | </gallery> | ||
| + | |||
| + | ===Post-IRI (28-July)=== | ||
| + | We persued the action plan from the [[DEWBOT VI IRI Post-Mortem | IRI Post-Mortem]] to further improve the possessor. | ||
| + | :* Replaced broker cylinder | ||
| + | :* Replaced standard clevises with ball joint rod ends to provide additional degrees of freedom thereby reducing the prospect of bending cylinder rods or binding action | ||
| + | :* Replaced 80/20 roller brackets with Kellom-custom 4-wheel keyed brackets | ||
| + | :* Installed ½" ID latex tubing on bottom rod in lieu of friction tape | ||
| + | :* Installed Deaver magnetic clutch in lieu of crude belt-tension friction "clutch" on possessor drive | ||
| + | |||
| + | <gallery widths=250 heights=250 perrow=3> | ||
| + | Image:DB6_mechanical_100728_csm.jpg|Mechanical team working on possessor | ||
| + | Image:DB6_mag_clutch_100728_csm.jpg|Deaver's magnetic clutch on possessor motor/gearbox | ||
| + | Image:DB6_possessor_bracket_100728_csm.jpg|Kellom's possessor bracket - designed to replace (2) 80/20 brackets and thereby eliminate bracket canting & binding. Bracket back has key fitting tight into 80/20 slot, assuring alignment. | ||
| + | </gallery> | ||
| + | |||
| + | The magnetic cluch created a lot of vibration, which keeps the possessor from working. We will continue development and test again next week. | ||
| − | + | ===4-August=== | |
| + | Gary Deaver revised the magnetic clutch by adding a 2<sup>nd</sup> drive disk with magnets out of phase with the 1<sup>st</sup> drive disk. The thought was that this arrangement would reduce possessor roller vibrations to the point where the possessor would work. This modification was ineffective and we went back to the crude friction clutch used at IRI. | ||
| + | |||
| + | The issue is that disengagement of the magnets (slippage of the clutch) forces a short period of reverse direction drive before the clutch magnets reengage at the next coupling. | ||
| + | |||
| + | A plate type friction clutch would work. The problem with friction clutches is heat and wear. Also we only have a 1.5 x 1.5" cylinder to fit it into. For now the slipping belts will have to do. | ||
| + | |||
| + | <gallery widths=250 heights=250 perrow=3> | ||
| + | Image:DB6_Deaver_Garrison_100805_csm.jpg|Gary Deaver & Garrison installing revised magnetic clutch | ||
| + | Image:DB6_mag_clutch_100805_csm.jpg|Deaver's magnetic revised clutch on possessor motor/gearbox | ||
| + | Image:DB6_drive_disk_100804_csm.jpg|2<sup>nd</sup> clutch drive disk | ||
| + | </gallery> | ||
==Mirror== | ==Mirror== | ||
| Line 141: | Line 196: | ||
:* It would be good to have a means of raising it during competition. A servo might be adequate. | :* It would be good to have a means of raising it during competition. A servo might be adequate. | ||
:* A working possessor, or a sensor to kick automatically would be a benefit now that we can find the hidden balls. | :* A working possessor, or a sensor to kick automatically would be a benefit now that we can find the hidden balls. | ||
| + | |||
====3-July Update==== | ====3-July Update==== | ||
| − | :*The mirror was moved back 1" to keep it within the frame perimeter. | + | :*The mirror was moved back 1" to keep it within the frame perimeter (Jen). |
| − | :*Initial prototyping and CAD took place for a servo raise/lower mechanism | + | :*Initial prototyping and CAD took place for a servo raise/lower mechanism (DJ). |
| − | |||
| − | == | + | ====4-July Update==== |
| − | + | Much effort - little progress. Servos do not appear to have the necessary torque to raise the mirror. | |
| − | |||
| − | |||
| − | |||
| − | |||
| − | + | Plan B would be to use a 3/4" pneumatic actuator. | |
| − | + | ====7?-July Update==== | |
| − | + | It works! With a little help from Foster and his VEXing, the servo pushes the mirror up with ease. It does not bring the mirror down. That's ok (in fact, it was in the functional specs), we'd rather have it up. A second latex tube has been added to the other side to prevent torquing. | |
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | + | ====11-July Update==== | |
| + | We've loosened the second latex tube to prevent the mirror from re-extending outside the frame perimeter. We've also added a simple latch (a deliberately damaged wire tie to allowed unlatching) to hold the mirror down during maintenance. The mirror is not raised during autonomous, though it can start up. Retrospectively, the servo placement makes bumper wingnut and lifting handhold access a bit more complicated. (The non-possessor motor side would have been better.) We'll live, though. We've also realized that we've gained some primo advertising real estate on the back of the mirror, and that we can add a polycarbonate back shield for the same reason. This is good, especially since we'll have to cover up some of the current sponsor logo space with our autonomous tape guides. Plus, this new space is vertical. | ||
| + | ====Mirror photo gallery==== | ||
| + | <gallery widths=250 heights=250 perrow=3> | ||
| + | Image:DB6_Douglas_Cole_Matt_plan_100704_csm.jpg|Cole, Douglas & Matt working on the plan of attack | ||
| + | Image:DB6_Matt_100704_csm.jpg|Matt & [[DEWBOT VI]] | ||
| + | Image:DB6_Matt_Stumpo_Douglas_100704_csm.jpg|Matt, John Stumpo & Douglas working on mirror lift | ||
| + | Image:DB6_Douglas_doing_the_math_100704_csm.jpg|Douglas doing the math behind the mirror lift | ||
| + | Image:DB6_servo_talk_100706_csm.jpg|Foster Schucker talks about servos | ||
| + | Image:DB6_servo_100711_csm.jpg|Working servo lift for mirror! | ||
| + | </gallery> | ||
| + | |||
| + | ==Programming Version Control== | ||
| + | Implement and use version control to enhance communication and collaboration. | ||
| + | ===Programmer Jobs=== | ||
| + | #Review the final code specs (below). | ||
| + | #Communicate and distribute assignments. Ensure team knows what you are working on and when your draft will be done. | ||
| + | #Indicate on meeting work plans what you will be doing during the meeting. Check off items (and upload your code) when you complete them. | ||
| + | #Use the Mercurial version control. Ensure versions are kept up-to-date and well labeled. Store code locally before competition (don't rely on internet at competition venues). | ||
| + | #Write, debug, and comment (describe how it works, possible issues/changes, etc) on your code. | ||
| + | #Ask questions as needed. | ||
| + | #Meet your deadlines and/or inform the team of issues. | ||
| + | #Inform the design team/meeting management what you need to test your code and how long you think it will take. | ||
| + | #Consolidate individual assignments into a single code body. Upload and test this as well. | ||
| + | ====Current Mercurial Assignment==== | ||
| + | #Create a local working copy of the repository on your own computer. | ||
| + | #Create a text file in the "wall" directory announcing your presence. (Hint: You will need to let Mercurial know about the new file by "add"ing it.) | ||
| + | #Get your new file to the repository. | ||
| + | ===Photo Gallery=== | ||
| + | <gallery widths=250 heights=250 perrow=3> | ||
| + | Image:DB6_Paul_100704_csm.jpg|Paul writing code | ||
| + | Image:DB6_programming_team_100706_csm.jpg|Programming Team | ||
| + | Image:DB6_Ben_Paul_100710_csm.jpg|Ben & Paul | ||
| + | Image:DB6_auto_kick_0_100711_csm.jpg|Autonomous kick from far field | ||
| + | Image:DB6_auto_30_100711_csm.jpg|Autonomous in near field (just prior to kick) | ||
| + | Image:DB6_programming_&_CAD_100728_csm.jpg|Programming & CAD teams at work (port-IRI) | ||
| + | </gallery> | ||
| + | |||
| + | ==Shop Organization== | ||
| + | Starting essentially on 10-July, we started reorganizing the shop in earnest. Why 10-July? Well, Mother Nature played a little joke that day. Morning rain was so intense that it flooded the robot shop via the outside door (at the bottom of a ramp). Fortunately, we arrived at the start of the flood and were ably to stay ahead of the water, so no damage was done. We pulled over 30 gallons of water off the shop floor. Opportunity was taken to organize the shop. | ||
| + | <gallery widths=250 heights=250 perrow=3> | ||
| + | Image:DB6_flood_100710_csm.jpg|Flooded robot shop | ||
| + | Image:DB4_in_water_100710_csm.jpg|[[DEWBOT IV]] remains in water | ||
| + | Image:DB6_Deaver_emptying_shopvac_100710_csm.jpg|Gary Deaver emptying the shopvac | ||
| + | Image:DB6_Rizzo_ready_for_the_flood_100710_csm.jpg|Mike Rizzo ready for the flood | ||
| + | Image:DB6_Maley_wringing_100710_csm.jpg|Siri Maley wringing water from towels | ||
| + | Image:DB6_empty_shop_100710_csm.jpg|Empty shop - ''where's all the junk?'' | ||
| + | Image:DB6_drying_out_100710_csm.jpg|Shop drying out | ||
| + | Image:DB6_Cole_prepping_cabinet_100710_csm.jpg|Cole prepping the cabinet for painting | ||
| + | Image:DB6_ready_to_paint_100710_csm.jpg|Matt & Faith McKown with cabinet ready to paint | ||
| + | </gallery> | ||
| + | |||
| + | ==Glick - 31-July== | ||
| + | Ben Kellom introduced me (Clem) to [http://www.mbglick.com Moses B. Glick LLC] today. Basically a salvage yard in Fleetwood PA (East-nor-east of Reading). Glick specializes in metals, tools and machinery. I picked up six sturdy work benches for our remaining time in DEC and of course our new home. Glick has a wide selection aluminum, steel, stainless steel, nylon,... stock in various sizes and shapes. Sold by weight. Aluminum is $1.50/lb. We should definitely look here before placing orders with our traditional supplier. | ||
| + | <gallery widths=250 heights=250 perrow=3> | ||
| + | Image:DB6_Glick_trailers_100731_csm.jpg|Glick trailers | ||
| + | Image:DB6_Glick_benches_100731_csm_1.jpg|Work benches found | ||
| + | Image:DB6_Glick_pneumatics_100731_csm.jpg|pneumatics trailer | ||
| + | Image:DB6_Glick_Al_100731_csm.jpg|Aluminum stock | ||
| + | Image:DB6_Glick_machines_100731_csm.jpg|mills | ||
| + | Image:DB6_Glick_benches_100731_csm_2.jpg|Work benches loaded | ||
| + | </gallery> | ||
| + | |||
| + | ===8-August=== | ||
| + | <gallery widths=250 heights=250 perrow=3> | ||
| + | Image:DB6_bench_work_100804_csm.jpg|Garrison, Drew & Cole flipping tops on the work benches | ||
| + | Image:DB6_Cole_100805_csm.jpg|Cole & work benches | ||
| + | Image:DB6_benches_100804_csm.jpg|1640's work benches | ||
| + | </gallery> | ||
---- | ---- | ||
Catch up on other team information at [[FRC Team 1640]] | Catch up on other team information at [[FRC Team 1640]] | ||
| − | [[Category:Robot]][[Category:DEWBOT VI]] | + | [[Category:Robot]][[Category:DEWBOT VI]][[Category:Summer Program]][[Category:Photo Galleries]] |
Latest revision as of 01:06, 10 August 2011

Contents
Objectives
Objectives for the 2010 Summer Program are focused on our desire to perform well at IRI. Towards this end, we are:
- Performing basic maintenance on the robot, especially the drive-train to compensate for the wear and tear of our competitions and demonstrations;
- Developing and implementing a possessor which really works;
- Getting the control code right & tested, including the angle-drive autonomous; and
- Adding a mechanism to raise the mirror.
Necessary Repairs & Maintenance & Drive-Train
Basic maintenance & upgrade work started 2-June and comprised:
- Pull all pivots. Add spacers between driven sprocket lower 1" bearing. Check condition and refurbish as needed. All treads will need to be changed (they're beat). I will order more treads.
- Replace Steering Jaguars with Victors and test.
- On Wednesday, 2-June, we followed the above plan, without finishing.
- Pivots removed
- (4) 0.520" PVC Spacers cut from 1" PVC pipe (we've got miles) - thanks, Douglas & John
- General cleaning & tread replacement. Steering sprockets pulled from pivots.
- Drilled holes for Jaguar > Victor switch. We made a template first, so that holes were drilled in the correct spots.
- Generally, pivots are in good condition excluding tread wear and carpet fiber accumulation on the transfer axle. No "broken" pivots as at PARC. All steering sprockets are 0.52" above lower bearing (same as model dimension - 0.521") except Pivot #3 at 0.33" (thereby our steering chain problem). Pivot #3 steering sprocket set screws were loose (not quite finger tight).
- The Pivot Replacement Process was documented.
- On Wednesday, 16-June, we continued:
- Molly & Garrison joined us - welcome!
- Steering Jaguars replaced with Victors. All drive Jaguars are black.
- Pivots 1 & 4 reinstalled. 2 & 3 still in service.
- PVC spacers installed.
- Work was completed on 19-June, just in time for the Upper Uwchlan Block Party.

Pivot removed from robot
Pivotless robot - Andrew & Sasha in background

David Moyer, Nicole, Sasha & Rita Wall service pivots

David Moyer retreading a pivot

Nicole, Mike Rizzo & David Moyer with robot

Rita Wall, Sasha & David Moyer retread wheels

Ben R programming Dewbot V

Return of the elusive Hans

Jon Davis & Garrison servicing worn pivots
Nicole, Andrew, Carly, Sasha & Molly exchanging steering Victors for Jaguars

Nicole, Carly, Andrew, Sasha & Molly exchanging steering Victors for Jaguars

Gary Deaver servicing pivot

Matt, Faith McKown & Garrison servicing pivots

Victors replacing steering Jaguars

DEWBOT reassembled & Victors replacing steering Jaguars















Possessor
At PARC, Monty Madness and (BR)2, we were dissatisfied with our possessor's performance. While it seemed to perform well enough at the STEM Defined demonstration, in the heat of competition, it tends to either fail to possess the ball, or to cause or allow the robot to drive over the ball. We really could not effectively herd balls into the goal either (because of a tendency to drive over them). This was addressed for IRI. Original options included:
- A vacuum possessor (like Team 25's)
- A Possessor with a low roller
- Adapt the possessor to grab the ball by pinching it (without lifting it off the floor) rather than just applying a backwards spin. [In virtually all benchmarking cases, this involves a low roller/bar anyway.]
Vacuum Possessor
- Preliminary analysis in Inventor indicates that it is feasible to accommodate a vacuum-type possessor similar to Team 25's in the DEWBOT VI chassis. The driver would have to accurately center the ball. Analysis and design were not pursued past this point.
Low Roller Possessor
- We've observed that robots with effective possessors often have passive rollers at or below the ball centerpoint. Installing such a low roller on DEWBOT VI without a major redesign was not trivial. Key challenges were:
- Avoiding interference with the kicker
- Avoiding interference with the pivots
- Maintaining our ability to cross bumps without difficulty. A low-position roller intrinsically is in the way when climbing a bump
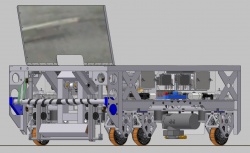
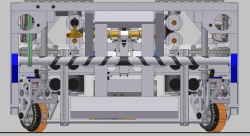
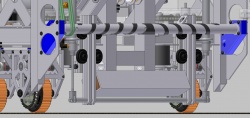
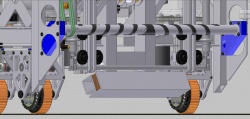
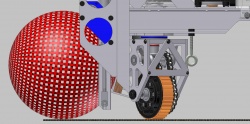
Trirol Possessor Design
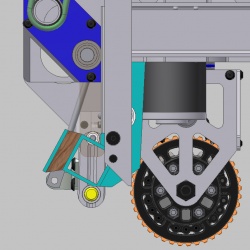
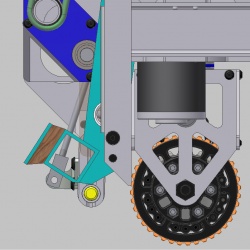
- A possessor was designed having an articulated, low, 3rd roller. Kicking clearance requires some non-structural kicker modification. Articulation is needed to clear the bump. For full specifications, see Trirol Possessor Design Specifications and Detailed Drawings.
As designed, this is a back-rolling possessor, not a pinching possessor. It could in principle be converted to a pinching possessor if the low roller bearings were removed or disabled.
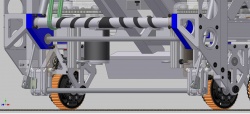
View of possessor with bottom roller in working (deployed) position
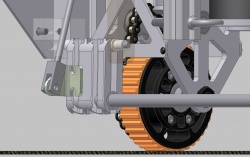
Detail of bottom roller articulation mechanism
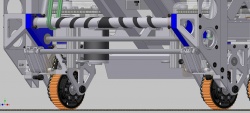
View of possessor with bottom roller raised (retracted) for crossing bumps
Side elevation with parts made invisible showing position of ball relative to the possessor elements

Front elevation
Robot view
Kicker close approach to 3rd roller - 1/3 - kicker boot
Kicker close approach to 3rd roller - 2/3 - closest approach
Kicker close approach to 3rd roller - 3/3 - maximum extension









Testing
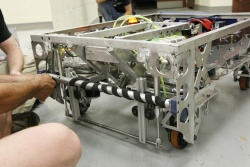
- At Jon Davis's suggestion, a fixed 3rd roll prototype was installed and tested on 30-June. Key observations:
 3rd roll prototype installed on DEWBOT VI
3rd roll prototype installed on DEWBOT VI- Possession performance appears unaffected by the 3rd roller - poor-to-mediocre
- On the other hand, it is now impossible to override the ball
- and herding now works very well, possessor on or off

- Overall, some small improvement, but not at all what we were hoping for.
- Adding friction tape to the bottom roller resulted in no observable improvement.
Hi/Lo Possessor
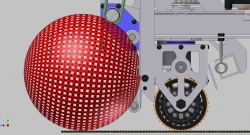
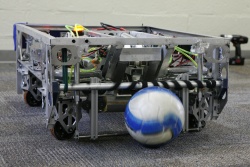
- We were planning to replace the middle steel roller with fiberglass, but before installing the fiberglass rod, we tested the possessor without the middle roller. This provided a phenomenal improvement in possessing performance. This Hi/Lo 2-roller possessor really works! With a stiff (steel, not fiberglass) and frictive Lo Bar, it's definitely a pincher. It makes no attempt to center the ball (but we're ok with that). No ball overdriving problem. Further development produced even better results. We have a Vulcan death grip (and it doesn't just convince the Romulans). The ball goes in. The robot goes forwards, backwards, sideways, slantways, longways, backways, and spinways. The ball stays in--approximately 2.75" but not more than 3", and not off the floor. It passes the ruler test, the paper test, and (most importantly) the Rizzo-the-Ref test. The only way to release the ball is to turn off/run backwards the possessor or kick. We don't even need to reduce the torque, though we can, since the vertical IR ball sensors work. The death grip doesn't visibly affect the kick range or arc (both of which are quite nice). The only way to pick up another ball is to get rid of the first--no way to possess two a once since the first on stop the top roller.

Testing the Hi/Lo 2-roller possessor

Testing the Hi/Lo 2-roller possessor - note ball in mirror view

The ball never leaves the floor

Heather McKown cutting parts

Paul, Kenneth, Siri Maley & DJ testing the possessor (some more than others)
Modified kicker

Siri Maley applying friction tape to the lower rod

Robot possessing

Whirling Dervish - spinning about wheelbase center - we hold on to the ball

Kicking (teleop)

Possessor mechanism detail - right

Possessor mechanism detail -left

Robot front elevation showing possessor (& photographer)

We pass the paper test!














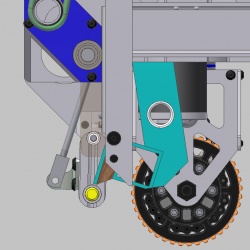
Back to the Drawing Board (July 3 & 4) - Articulation Redesign
- The elimination of the middle roller made access for actuation of the low roller simpler. Narrowing the top roller is no longer necessary. A design with this change was started, then abandoned. The possessor went through two major redesigns in two days. In addition, our tests make it clear that a great deal of backwards force is applied on the low roller. The Trirol's low roller mount was not designed with this sort of force in mind. We therefore needed a more robust approach for the articulated low roller.
- After prototyping and CAD work, the final design emerged to be vertical retraction actuated by (2) 3/4" diameter x 4" stroke pneumatic cylinders. For full details, see Hi/Lo Vertical Retraction Details.
- The kicker still needed to be modified slightly (cut down from 15" to 13"), and the possessor system is effectively narrower. Neither of these significantly limit possessor or kicking.
- The excessive load on the possessor motor & drive presented some damage issues. Possible solutions pursued included:
- Limit current to the motor via a current-based feedback loop (a control/electronic solution)
- Reduced the frictional coefficient or the normal load between the possessor drive belt and either the motor pulley or the possessor tube, turning this into a poor man's clutch.
The first option requires implementing CAN. We did switch the possessor motor from a Victor to a black Jag, but development stopped there given the complexities in adding CAN at this point. The second option proved more practical provided the final solution. Looser polycord belts (from 8% reduction to 6%) reduced the normal loads. Adding friction tape to the motor pulley (in addition to the Lo Bar) increased the pulley-belt frictional coefficient relative to the Hi Roller-belt coefficient, inducing the belt to slip only on the Hi Roller. This is also much less taxing on the polycord.
- Additionally, benchmarking of other successful bottom rollers (which neither roll nor facilitate rolling) revealed an inordinate number of teams using 1/2" angle. Prototyping (with aluminum) seems to reveal why. The ball tends to roll (and thus fall out) much less than with even the misnamed bottom roller bar, and holds somewhat better in snake and much better in strafing. (Strafing is a beneficial aspect of our drivetrain could prove very helpful on defense against a certain looper bot at IRI.) The system isn't yet to death-grip standard, but I (Siri) wouldn't be overly surprised if changing the roller(s) surface(s) and/or speed (recommended at 2x robot speed) got us quite close.
- We appear to be having sporadic DS-robot communication malfunctions, both during bootup and randomly mid-test. It'd be great to determine the root cause(s).

Heather McKown preparing to cut 3" square tube on bandsaw for actuator mounting

Heather McKown cutting 3" square tube on bandsaw for actuator mounting

Clem McKown building new possessor CAD model in Autodesk Inventor

Heather McKown finishing an actuator mount on the belt sander

Siri Maley setting the low roller into the lathe

Siri Maley cutting low roller end to accept actuator clevis
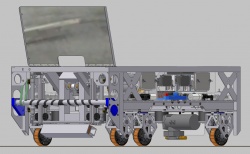
Robot with low roller retracted & kicker relaxed
Robot with low roller extended & kicker relaxed
Front elevation - low roller extended & kicker relaxed
Front detail with low roller extended & kicker relaxed
Front detail with low roller retracted & kicker relaxed
Side elevation with low roller extended & kicker at ball contact position












Final Designing Photo Gallery

Heather cutting possessor actuator mount

John Stumpo turning the end of the low possessor rod

Actuator mount clamped for welding

The robot protected for welding

Possessor actuator mounts welded

Left actuator mount
Right actuator mount
Possessor installed with pneumatic actuators & plumbing

Possessor work team

Matt & Heather McKown work the lathe

Douglas changing possessor belts

Jen turning a spare possessor rod on the lathe

spare possessor rod on the lathe

Gary Deaver, Mike Rizzo & Siri Maley with robot
robot possessing















Testing & Driving Practice (12-July)
We encountered several problems during driver practice & testing on 12-July. View the night's log here. In summary, we've got some practicing to do. Most of the work will focus around increasing competency with the new possessor, practicing 2 robot (thanks, DEWBOT V) interactions on defense and offense, and addressing any maintenance issues that arise (including training the pit crew).

Drive teams at practice

Nicole & Jack

Kenneth & Ben



Post-IRI (28-July)
We persued the action plan from the IRI Post-Mortem to further improve the possessor.
- Replaced broker cylinder
- Replaced standard clevises with ball joint rod ends to provide additional degrees of freedom thereby reducing the prospect of bending cylinder rods or binding action
- Replaced 80/20 roller brackets with Kellom-custom 4-wheel keyed brackets
- Installed ½" ID latex tubing on bottom rod in lieu of friction tape
- Installed Deaver magnetic clutch in lieu of crude belt-tension friction "clutch" on possessor drive

Mechanical team working on possessor

Deaver's magnetic clutch on possessor motor/gearbox

Kellom's possessor bracket - designed to replace (2) 80/20 brackets and thereby eliminate bracket canting & binding. Bracket back has key fitting tight into 80/20 slot, assuring alignment.



The magnetic cluch created a lot of vibration, which keeps the possessor from working. We will continue development and test again next week.
4-August
Gary Deaver revised the magnetic clutch by adding a 2nd drive disk with magnets out of phase with the 1st drive disk. The thought was that this arrangement would reduce possessor roller vibrations to the point where the possessor would work. This modification was ineffective and we went back to the crude friction clutch used at IRI.
The issue is that disengagement of the magnets (slippage of the clutch) forces a short period of reverse direction drive before the clutch magnets reengage at the next coupling.
A plate type friction clutch would work. The problem with friction clutches is heat and wear. Also we only have a 1.5 x 1.5" cylinder to fit it into. For now the slipping belts will have to do.

Gary Deaver & Garrison installing revised magnetic clutch

Deaver's magnetic revised clutch on possessor motor/gearbox

2nd clutch drive disk



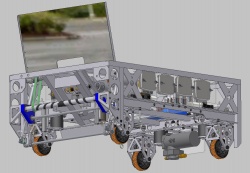
Mirror
Looks really good, but we should:
- Verify that it stays within the frame perimeter.
- It would be good to have a means of raising it during competition. A servo might be adequate.
- A working possessor, or a sensor to kick automatically would be a benefit now that we can find the hidden balls.
3-July Update
- The mirror was moved back 1" to keep it within the frame perimeter (Jen).
- Initial prototyping and CAD took place for a servo raise/lower mechanism (DJ).
4-July Update
Much effort - little progress. Servos do not appear to have the necessary torque to raise the mirror.
Plan B would be to use a 3/4" pneumatic actuator.
7?-July Update
It works! With a little help from Foster and his VEXing, the servo pushes the mirror up with ease. It does not bring the mirror down. That's ok (in fact, it was in the functional specs), we'd rather have it up. A second latex tube has been added to the other side to prevent torquing.
11-July Update
We've loosened the second latex tube to prevent the mirror from re-extending outside the frame perimeter. We've also added a simple latch (a deliberately damaged wire tie to allowed unlatching) to hold the mirror down during maintenance. The mirror is not raised during autonomous, though it can start up. Retrospectively, the servo placement makes bumper wingnut and lifting handhold access a bit more complicated. (The non-possessor motor side would have been better.) We'll live, though. We've also realized that we've gained some primo advertising real estate on the back of the mirror, and that we can add a polycarbonate back shield for the same reason. This is good, especially since we'll have to cover up some of the current sponsor logo space with our autonomous tape guides. Plus, this new space is vertical.
Mirror photo gallery

Cole, Douglas & Matt working on the plan of attack

Matt & DEWBOT VI

Matt, John Stumpo & Douglas working on mirror lift

Douglas doing the math behind the mirror lift

Foster Schucker talks about servos
Working servo lift for mirror!






Programming Version Control
Implement and use version control to enhance communication and collaboration.
Programmer Jobs
- Review the final code specs (below).
- Communicate and distribute assignments. Ensure team knows what you are working on and when your draft will be done.
- Indicate on meeting work plans what you will be doing during the meeting. Check off items (and upload your code) when you complete them.
- Use the Mercurial version control. Ensure versions are kept up-to-date and well labeled. Store code locally before competition (don't rely on internet at competition venues).
- Write, debug, and comment (describe how it works, possible issues/changes, etc) on your code.
- Ask questions as needed.
- Meet your deadlines and/or inform the team of issues.
- Inform the design team/meeting management what you need to test your code and how long you think it will take.
- Consolidate individual assignments into a single code body. Upload and test this as well.
Current Mercurial Assignment
- Create a local working copy of the repository on your own computer.
- Create a text file in the "wall" directory announcing your presence. (Hint: You will need to let Mercurial know about the new file by "add"ing it.)
- Get your new file to the repository.
Photo Gallery

Paul writing code

Programming Team

Ben & Paul

Autonomous kick from far field

Autonomous in near field (just prior to kick)

Programming & CAD teams at work (port-IRI)






Shop Organization
Starting essentially on 10-July, we started reorganizing the shop in earnest. Why 10-July? Well, Mother Nature played a little joke that day. Morning rain was so intense that it flooded the robot shop via the outside door (at the bottom of a ramp). Fortunately, we arrived at the start of the flood and were ably to stay ahead of the water, so no damage was done. We pulled over 30 gallons of water off the shop floor. Opportunity was taken to organize the shop.

Flooded robot shop

DEWBOT IV remains in water

Gary Deaver emptying the shopvac

Mike Rizzo ready for the flood

Siri Maley wringing water from towels

Empty shop - where's all the junk?

Shop drying out

Cole prepping the cabinet for painting

Matt & Faith McKown with cabinet ready to paint







Glick - 31-July
Ben Kellom introduced me (Clem) to Moses B. Glick LLC today. Basically a salvage yard in Fleetwood PA (East-nor-east of Reading). Glick specializes in metals, tools and machinery. I picked up six sturdy work benches for our remaining time in DEC and of course our new home. Glick has a wide selection aluminum, steel, stainless steel, nylon,... stock in various sizes and shapes. Sold by weight. Aluminum is $1.50/lb. We should definitely look here before placing orders with our traditional supplier.

Glick trailers

Work benches found

pneumatics trailer

Aluminum stock

mills

Work benches loaded






8-August

Garrison, Drew & Cole flipping tops on the work benches

Cole & work benches

1640's work benches



Catch up on other team information at FRC Team 1640