DEWBOT VIII Drive Train

- Ability to cross the mid-field line via either the Bridge or going over the Barrier (Need)
- The ability to drive in the wide orientation in order to fit three robots on a Bridge (Need)
- The ability to drive in the wide orientation to facilitate ball pick-up from the playing field (Need)
- Avoid blocking robots, especially between Key & Bridge (Desired)
- Ability to lock wheels on the Bridge to avoid rolling off when power is cut (Desired)
While not a specific strategic requirement, it was perceived that the ability to drive in the narrow orientation would make crossing over the Barrier safer & easier.
Furthermore, if pivot drive was used, it was decided that the shooter would be aimed my rotating the robot, rather than via a rotating turret (not applicable if tank drive was selected). The logic was that pivot drive enabled the entire robot to become a turret, so we should exploit this and avoid a redundant turret.
Team 1640's signature Pivot drive-train seemed to meet some of the game's requirements very well (especially driving in either wide or narrow orientations), but how would be get over the Barrier? 1640's pivots had always used 4" wheels in the past. No way they're going over a 4" Barrier, right?
Contents
- 1 Reflection
- 2 Concepts
- 3 Prototypes
- 4 Decision
- 5 Drive Modes
- 6 Pivot Drive changes since 2011
- 7 Pivot Module Design and Bill of Materials
- 8 Pivot Drive Specifications
- 9 Barrier Wheel Drive Specifications
- 10 Pivot Calibration
- 11 Pivot Angle Sensor
- 12 Barrier Wheel Drive Transmission
- 13 Colson Wheels
- 14 Pivot Top / Pivot Tube problems & solutions
- 15 Belt Tensioner
Reflection
Perspective during build season: Crossing the Barrier is a Need? Really? Yes, it is certainly do-able, but this capability is likely to be expensive in terms of mass, cost and compromises made to other (perhaps more critical) capabilities.
Perspective after the Hatboro-Horsham District Event: Barrier crossing is really useful. DEWBOT VIII crosses the barrier wicked-easy (most times). Our demonstrated ability to cross the barrier was one of the reasons the 1st alliance selected us. We made the right decision here. This was re-enforced at Philadelphia.
Costs:
- With the decision to use Pivot Drive and to cross the barrier, we agreed to forgo pneumatics as a mass-saving measure
- Barrier crossing design used up a lot of brain time & fabrication time, which might have been better applied elsewhere
Concepts
Initial concepts included:
- A 6wd wide chassis (like DEWBOT V) with 8" Pneumatic wheels (or larger)
- 8" Pneumatic wheels (or larger) in-line with pivots, either outside or inside between, either undriven or driven
- A ramp and skid-plate in-line with pivots and between them
- Redisign pivot drive for 8" Pneumatic wheels (or larger)
It was decided to pursue options 1-3 via prototyping and testing. Option 4 was discarded due to mechanical considerations and limitations in design resources.
Prototypes
6wd Wide Tank with 8" Pneumatic Wheels
- The DEWBOT V chassis was allocated to test this concept. Unfortunately, work did not proceed at a sufficient rate and this concept was not tested before a decision needed to be made (and therefore never tested). Too bad.

8" wheels in line with Pivots
- Based on the geometric understanding that (a) large-diameter wheel(s) in-line with and either outside (safer) or inside (more practical) the two pivots on a short side of the robot would protect the pivota and raise the robot up to the barrier top and lower it (safely?) back down.
- Testing used the DEWBOT VI chassis. Initial testing used unpowered 8" KitBot wheels outboard of the Pivots. This configuration failed to clear the Barrier. A second version utilized a driven 8" AndyMark pneumatic wheel between the pivots.

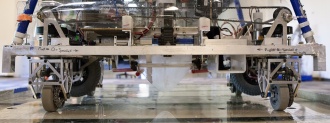
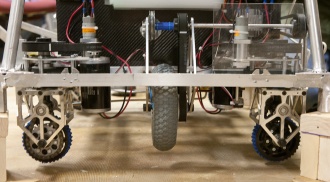
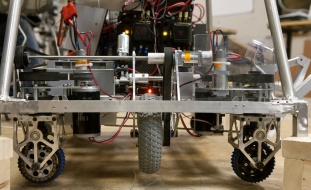
Unpowered 8" KitBot wheels on DEWBOT VI

Driven 8" pneumatic wheel (with too much wood)

DEWBOT VI faces its nemesis...

...and overcomes it!




- This worked and became the basis of DEWBOT VIII's drive-train design.
Skid-plate in line with Pivots
- We tested polypropylene skid plates in lieu of the 8" pneumatic wheel. This works if the angle of attack is low enough. Unfortunately, the necessary angle of attack does not leave enough space for anything else.

Decision
On 14-January, we made the decision to proceed with Pivot Drive using 4" wheels in combination with (2) 8" AndyMark Pneumatic wheels positioned along the chassis long-axis centerline with the axles in-line with the pivot centerpoints. 8" wheels are 5/8" off the flat playing field. One FisherPrice drive motor with a 104:1 BaneBots gearbox will drive both wheels, with a further 38:32 reduction via synchronous belt & pulleys (123.5:1 overall reduction).
To save mass, this motor/gearbox will also drive the Beater Bar.
Drive Modes
Specific drive modes were developed for Rebound Rumble. These are:
- Fat Snake - Primary drive mode - snake drive with a wide chassis orientation and the front of the robot being the ball collection/bridge arm side. Used for ball collection and bridge crossing/balancing.
- Barrier Crossing Mode - a Skinny Snake - Used exclusively for crossing the Barrier - Pneumatic wheels are automatically driven in the direction of robot travel while in this mode.
- Aiming mode - Orients wheels on a circle and rotates chassis about center. For shooting and chassis reorientation. Unlike previous DEWBOTS, this mode remains on until specifically turned off.
- Crab mode - Primarily for evasion
Pivot Drive changes since 2011
The team repeated the value engineering excercise on the pivot design. In 2011, we did not experience reliability problems with the pivot modules, so our focus was on:
- Eliminating the need for separate left and right pivot modules, thereby elininating the need to bring separate left and right spares to competitions;
- Steer straight better
- Reduce mass
- Reduce cost
- Software changes to create the appropriate drive modes for the 2012 game
We clearly succeeded with the first, third and fourth objectives. Initial driving tests suggest we succeeded with the second as well (but let's give this some time). The ability to adapt drive performance in software to meet game needs is a clear benefit of this drive-train.
All 2012 pivot modules are identical. All angle sensors are calibrated to the same relative zero point, so no calibration is needed with a pivot module swap.
Pivot drive train (4 pivot modules) mass has declined from an original 40.0 lbm (2010) to 37.2 lbm (2011) and now to 34.5 lbm (2012).
Pivot drive cost was reduced by over 9% (following FRC robot accounting rules) from 2011 to 2012.
Pivot Module Design and Bill of Materials
Pivot Drive Specifications
- Wheelbase: 21.25" x 28.25"
- Drive Motors: CIMS - 1 per wheel - there are (4) wheels
- Wheels: 4 in AndyMark Plaction wheels (am-0198)
- Gear Reduction: 8.30:1 in 2 stages (56:18 by HTD5 synchronous belt & pulleys; 24:9 by #35 chain & sprockets)
- Maximum Speed: 9.8 ft/s on level ground
- Steering Motors: BaneBots M3-RS395-12 - 1 per wheel
- Steering Reduction: BaneBots 3-stage 132:1 planetary gearbox; transmitted 1:1 via HTD5 synchronous belt with 32T pulleys
- Maximum steering speed: 1.96 rev/s (unloaded)

Barrier Wheel Drive Specifications
- Wheelbase: 28.25" (wheels centered on the robot's long axis)
- Drive Motor: (1) FisherPrice 00968-9013 driving both wheels
- Wheels: (2) 8 in AndyMark Pneumatic Wheels (am-0970)
- Gear Reduction: BaneBots 3-stage 104:1 planetary gearbox; transmitted 38:32 via HTD5 synchronous belt; 123.5:1 overall
- Unloaded velocity: 4.7 ft/s
- Stall Force: 130 lbf at wheel radius
Pivot Calibration
Pivots are calibrated to zero identically - relative to the pivot module. In this way, pivot modules may be exchanged or replaced without having to recalibrate. A great time saver!
Pivots zeroed - Rear view - sprockets face to the right

Pivots zeroed - Front view - sprockets face to the right
Pivots zeroed - Left Side
Pivots zeroed - Right Side





Pivot Angle Sensor
Once again we changed angle sensors, this year using BI Technologies Magnepot Hall Effect Potentiometer Part # 6127V1A360L.5FS. Our primary driver was cost ($10.88 each), but there were performance benefits to the new sensor as well. The challenge was in the electrical connectors, which required soldering wires to the sensor. A second challenge is availablility, which has been spotty.
Sensors were coupled to the steering drive shaft via a flexible coupling (GJ-6D from Automation Direct - $6.75 each). The couplings reduced the potential for damaging the sensors due to misalignment.
Barrier Wheel Drive Transmission
Both Barrier Wheels (and the Beater Bar) are driven by a single FisherPrice 00968-9013 motor utilizing a 104:1 BaneBots P60 gearbox on the robot's right side. The Gearbox drives a 3/8" shaft supported by bearing. There are two HTD5 32T synchronous pulleys on this shaft. One of the pulleys drives the right Barrier Wheel via a 535mm HTD5 belt and a 38T HTD5 pulley mounted directly to the Barrier Wheel hub.
The second pulley, at the extreme back of the robot, provides power transmission to the left side of the robot via a 1595mm HTD5 belt to a matching 32T pulley on a left-side 3/8" drive shaft; again supported by bearings. The left-side drive shaft has a 2nd 32T HTD5 pulley driving the left Barrier Wheel (again, via a 535mm HTD5 belt and a 38T HTD5 pulley mounted directly to the Barrier Wheel hub). The left-side drive shaft also has a 2.1" round-belt pulley (not synchronous) for the Beater Bar power take-off.
Colson Wheels
We observed a great deal of wheel slippage on the bridge at Lenape and sought wheels with improved traction to address this. A number of sample tread materials and wheels were tested, from which a selection of the 4" Colson Wheels (McMaster-Carr Part # 2829Y73) was made.
Colson wheels are lower cost ($10.30 for wheel including integral tread and bearings) than our old Plactions. On the other hand, if we wear out these treads, we need to replace the wheels. The mass change versus Plaction wheels is insignificant.
Our experience with the Colson wheels at the Mid-Atlantic Region Championship was positive, although we feel that the bridge surfaces were not as slippery here as they had been at Lenape. Performance on carpet was rated as superior to Plaction/Roughtop wheels by our driver. The Colsons are keepers!
An unintended side benefit of Colson wheels: they are floor friendly. We can drive the Colson-fitted robot on hardwood floored gymnasiums or linolium without worry about damaging these floors.
Pivot Top / Pivot Tube problems & solutions
The joint between the Pivot Top and Pivot Tube is a key potential failure point for this design. All rotational bearings are above this juncture, which becomes a natural locus for stress concentration. In 2011, this joint was successfully secured via thermal interference fit. Only one of the eight 2011 pivots failed at this point, and this one failed in 2012 - beyond the service life requirement. We understood that the Barrier Crossing and the Bridge would bring loads to bear on the pivots in 2012 well beyond those experienced in 2011.
The same approach was intended for 2012 pivots, but the pivot tube ends (the insertion points) were mistakenly machined to too small a diameter, eliminating the opportunity for interference. As a fix, the inserted tube ends were knurled and press fitted with red loktite adhesive. It was hoped that this would suffice. For a time it did.
Initial indications of trouble with this joint was exhibited by the need for frequent pivot recalibration, starting at Lenape, where the first joint failed. We repaired the failed pivot using spare parts, but also used the failed original parts to test a welded repair process for the joint.
When another pivot's joint failed completely at the FRC Championship in St. Louis, we took action. At this point, we did not employ the tested weld repair, but rather drilled holes starting from a bolt hole bottom on the Pivot Top into the Pivot Tube (we believed) and inserted a steel pin to secure the two. Ongoing problems at Bridgewater-Raritan Battle Royale and third and fourth pivot joint failures during driver practice afterwards made it abundantly clear that the pin fix had been ineffective (due to insufficient drilling depth, it turns out).
In June, all (8) 2012 pivots were therefore disassembled and repaired using the welding repair piloted following the Lenape failure. Photographs of the repair process are provided below.

Kira, Lucy, Garrison & Nicole disassemble pivots in preparation for repair

Chamfers cut in tube and top plate

Work clamped for welding
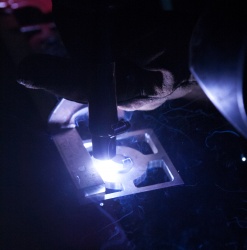
Welding

As-welded piece in lathe for surface planing
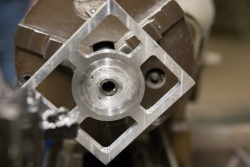
Welded surface turned down to plane






No problems were experienced with the drive train or its calibration during IRI.
Belt Tensioner
Problems did occur at IRI, however, with the 1595mm HTD5 barrier wheel transmission belt slipping off its pulleys. The belt had become noticably looser with use. Kelloms designed and built a wonderful (and really cool-looking) tensioner to correct this problem. The screw adjusts the tension (not spring-loaded).

Belt tensioner
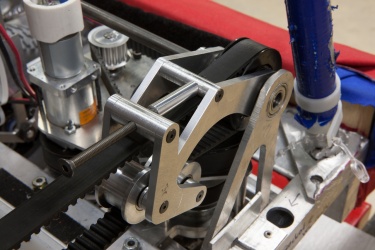
Belt tensioner

