Difference between revisions of "DEWBOT VII"
(→Drive Train) |
|||
| (174 intermediate revisions by 9 users not shown) | |||
| Line 1: | Line 1: | ||
| − | + | [[Image:DB7_Team_photo_110221_csm.jpg||right|450px|thumb|Team with DEWBOT VII ''prime'' & ''deux'' on final night of build season]]The team set two very aggressive '''goals''' for 2011: | |
| + | #Win 1 Regional Event - accomplished at the [[DEWBOT VII Philadelphia Regional|Philadelphia Regional]]! | ||
| + | #Attend [[DEWBOT VII FRC Championship | FRC Championship]] in St. Louis 27-30 April, 2011 - done | ||
| − | + | DEWBOT VII was designed to meet the specific challenges posed by FRC's 2011 game: [http://en.wikipedia.org/wiki/Logomotion '''Logomotion''']. | |
| − | + | To help meet these goals, the team did a number of things differently this year: | |
| − | + | :* A new front-end design process to help us set clear, early strategic objectives and specification was instituted. We piloted this process in December. | |
| − | + | :* For the first time, team 1640 built two robots: ''Prime'' and ''Deux''. ''Prime'' goes to the competitions. ''Deux'' stays home for driver practice and serves as a software & hardware development platform. ''Duex'' also graciously provides spare parts for competitions. | |
| + | :* A (nearly) full-size practice field was set up at the Downingtown Robotics Center, enabling driver practice under realistic conditions. | ||
| + | :* Our mill was set up and used almost continuously during build season. The lathe also received more use this year than during the past six. With the help of new mentor Ben Kellom, '''accuracy''' became a 1640 hallmark. This year, interchangeable parts really are! | ||
| − | < | + | {{#ev:youtube|VPzti1GNJrs|300|right|DEWBOT VII competing at Championships (Win 90-84)}}Notable accomplishments: |
| − | + | :* As 2<sup>nd</sup> alliance captain, 1640 led this alliance to victory at [[DEWBOT VII Philadelphia Regional|Philadelphia]].[[Image:DB7_Phila_hanging_110408_csm.jpg|right|300px|thumb|Hanging a red triangle at [[DEWBOT VII Philadelphia Regional | Philadelphia]]]] | |
| + | :* Received [[DEWBOT VII - Philadelphia - Rockwell Automation's Innovation in Control Award | Rockwell Automation's Innovation in Control Award]] - Also at Philadelphia. | ||
| + | :* Participated in the [[DEWBOT VII FRC Championship | FRC Championship]] for the first time as a team. | ||
| + | :* Were invited to, and participated in the [[DEWBOT VII Indiana Robotics Invitational | Indiana Robotic Invitational]] (IRI) for the 2<sup>nd</sup> consecutive year. | ||
| + | :* '''Champions''' - [[DEWBOT VII Duel on the Delaware | Duel on the Delaware]] | ||
| + | :* '''Finalists''' - [[DEWBOT VII Ramp Riot | Ramp Riot]] with 2<sup>nd</sup> robot & drive team competing under the ''nom de guerre'' 1641 | ||
| − | == | + | ==[[DEWBOT VII Build]]== |
| + | Build season is the heart of the FRC year. It is the 45 days during which the team's students and mentors put their hearts, minds and hands into designing and building a great robot. Paradoxically, the time seems both far too short and much too long. | ||
| + | Starting with a cold January 8<sup>th</sup> morning and ending up in the middle of an even colder February night. The chronicles of the [[DEWBOT VII Build]] season make interesting reading of how we all band together to perform an almost impossible task of designing, building and testing a robot in such a short time frame. Associated with each weeks build are pictures showing happy (and towards the end, tired) roboteers and mentors hard at work. | ||
| − | == | + | ==Design Details== |
| − | + | [[image:2011_pivot_annotated.jpg|270px|right|thumb|2011 Pivot Module design]] | |
| − | === | + | ===[[media:Dewbot_7.zip | CAD Design]]=== |
| − | |||
| − | == | + | ===[[DEWBOT VII Drive Train|Drive Train]]=== |
| − | + | :Following an long and animated debate on the evening of January 10<sup>th</sup> 2011, the team decided to use a Pivot drive-train on DEWBOT VII, rather than 6WD Tank. The final vote was 7 to 2. | |
| − | |||
| − | + | :Pivot drive provides our drivers with the combination of extraordinary agility and maneuverability with power and traction. It is like combining the best attributes of the two most common FRC drive-trains, [[Mecanum]] and [[6wd | 6WD]] Tank, together in one robot. | |
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | + | :The balance is cost and resource management. Sab-BOT-age's Pivot Drive design controls the steering and drive for all four wheels independently through software. This makes for an extremely flexible drive systems (think fly-by-wire), but uses eight motors, eight motor controllers, a fair amount of the cRIO's processing capability, a lot of complex control software and a very large number of precision machined parts. ''It's not your Grandmother's robot drive-train''. The team pioneered this drive-train in [[DEWBOT VI Drive Train | 2010]], receiving the [[DEWBOT VI Creativity Award sponsored by Xerox (Philadelphia Regional) | Xerox Creativity]] and (BR)<sup>2</sup> Engineering Excellence Awards for the design & execution. | |
| − | + | :In the end, the drivers and programmers were the most persuasive and adamant champions of Pivot Drive. Chief Driver Carly was unwilling to give up a drive-train which provided the team with a critical competitive advantage in 2010 and appeared to offer the same in this year's game. The programming team was equally clear that they were up to the software challenge. | |
| − | |||
| − | |||
| − | + | :The [[DEWBOT VII Drive Train | 2011]] Pivot Drive benefits from a Value Engineering program the Team conducted during October & November of last year, and incorporates significant improvements. | |
| − | == | + | ===Mechanical Scoring=== |
| + | :[[Image:DB7_DD_111022_csm-11.jpg|250px|right|thumb|The moment of contact - [[DEWBOT VII Minibot#Mighty Mouse|Mighty Mouse]] wins another minibot race at [[DEWBOT VII Duel on the Delaware | Duel on the Delaware]]]]Scoring is defined in the 2011 Game Manual. We made an [http://www.chiefdelphi.com/media/papers/2428 Excel interface] that calculates the autonomous, teleoperated, and minibot race scores to help us determine strategy.<br> | ||
| − | + | :From a mechanical standpoint, there are two distinct scoring systems: | |
| − | + | ::# A system to hang Ubertubes (in autonomous) and Logo Pieces (in teleop) on the Scoring Grid, and to collect Logo Pieces from the Human Players or pick them off the floor ([[DEWBOT VII Arm |'''The Arm''']]); and | |
| + | ::# A [[DEWBOT VII Minibot | '''Minibot''']] with its [[DEWBOT VII Minibot Deployment | '''deployment system''']] for scoring bonus points during the end game. | ||
| + | <br> | ||
| + | :The key '''strategic imperatives''' for the mechanical scoring systems were: | ||
| + | ::* The ability to quickly & reliably score Ubertubes and Logo Pieces on the top row of the scoring grid; | ||
| + | ::* Reliable deployment of a reliable minibot is essential; | ||
| + | ::* We need to signal Logo Piece needs to the Human players; | ||
| + | ::* The minibot & deployment should be fast (this is a race, after all); and | ||
| + | ::* We should be able to quickly and reliably score on all rows of the scoring grid. | ||
| − | *The | + | ====Autonomous==== |
| − | * | + | [[image:DEWbotVII_autonomous_scenarios.JPG|300px|right|thumb|Autonomous Scenarios]] |
| − | + | :'''Preliminary analysis of autonomous mode scenarios:''' | |
| − | * | + | ::* Autonomous scoring is essential (top row); |
| + | ::* The area in front of the scoring grid will become congested during autonomous; there is a premium for being the third robot on an alliance which can score autonomously (without colliding with alliance partners); | ||
| + | ::* Contingency #2 ("Dead Reckoning") is deemed not possible due to the inability of the drive train to drive straight on its own (i.e. without sensor or human correction). | ||
| + | ::* Edge following is desirable for the branching scenarios. | ||
| − | == | + | ===Mass=== |
| − | + | At [[DEWBOT VII Finger Lakes Regional | Finger lakes]], DEWBOT VII's mass at reinspection for play-offs was 113.4 lb<sub>m</sub> (127.5 lb<sub>m</sub> with Bumpers - 14.2 lb<sub>m</sub> for the 2<sup>nd</sup> set of Bumpers - no-one paid attention during initial inspection). | |
| − | + | By [[DEWBOT VII Philadelphia Regional | Philadelphia]], modifications increased DEWBOT VII's mass to 117.9 lb<sub>m</sub> at final weigh-in (117.8 lb<sub>m</sub> at the initial inspection). 13.8 lb<sub>m</sub> for one set of bumpers; 14.1 lb<sub>m</sub> for the other. | |
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | == | + | ===Drive / Tactical=== |
| − | + | Click [[DEWBOT VII Drive Team Page | here]] to enter Drive Team Page. Contains robot control information and player information. | |
| + | |||
| + | ===Strategy/Scouting=== | ||
| + | [[Media:Line of Sight-skm.ppt | View from the Front, View from the Top]] - what the field looks like in play, 28 Jan 11<br> | ||
| + | [[Media:Minibot Deployment Analysis-skm-rev1.ppt | Minibot Deployment Tactics]] - technical & non-technical minibot deployment considerations, 23 Jan 11<br> | ||
| + | [[Media:LogoMotion Game Play Strategy.ppt | Strategic Analysis]] - potential strategies as well as what others are likely to do, 27 Feb 11<br> | ||
| + | |||
| + | ==Events== | ||
| + | |||
| + | ===Baltimore Area Alliance FRC Workshop=== | ||
| + | :6-November-2010. Very helpful and educational. Our thanks to the BAA for their gracious invitation. (6) attended from 1640. | ||
| + | |||
| + | ===Move into Downingtown Robotics Center=== | ||
| + | :In November, Downingtown Area Robotics moved from the Micklen Building into a 17,000 ft<sup>2</sup> warehouse at 320 Boot Road, Downingtown. This is a great space for robotics, allowing a full-scale practice field. Alas, no sense of permanence. Our 6<sup>th</sup> home (and by-far very best to-date). | ||
| + | <gallery widths=250 heights=250 perrow=3> | ||
| + | Image:DB6_DRC_101107_csm-1.jpg|Carly, Selina & Garrison organize our workspace within the Downingtown Robotics Center | ||
| + | Image:DB6_DRC_101107_csm-2.jpg|Power tool alley | ||
| + | Image:DB6_DRC_101107_csm-3.jpg|Storage closet | ||
| + | </gallery> | ||
| + | |||
| + | ===Practice Kick-off=== | ||
| + | :Team 1640 conducted a [[2010 Practice Kick-off | Practice Kick-off]] on 11 & 12-December 2010 in preparation of the real deal. A formal [[2010_Practice_Kick-off#The_Design_Process | Design Process]] was introduced [[image:DB6_CPR_101218_csm-3.jpg|right|300px|thumb|CPR Training]]and tested during this exercise. 2006 [http://en.wikipedia.org/wiki/Aim_High Aim High] game rules were employed for the robot basis, with the exception of the control system, which utilized 2010 standards. | ||
| + | |||
| + | :Game simulation using students as robots proved very effective and provided very good insights into the game play and requirements for winning matches. | ||
| + | |||
| + | :As always, the most difficult part of strategic decision making was in deciding which options not to pursue. Need to work on this. | ||
| + | |||
| + | ===CPR Training=== | ||
| + | :Nine students, mentors and parents from Team 1640 received CPR training and 2-year ASHI certification on 18-Dec at the Uwchlan Ambulance Corps. | ||
| + | |||
| + | ===[[DEWBOT VII Finger Lakes Regional | Finger Lakes Regional]] - 3-5 March=== | ||
| + | :The team had a rough start, with some cRIO problems which took a while to resolve. In the end, however, we were selected for the 4<sup>th</sup> alliance and made it to the semifinals. We were defeated by the 1<sup>st</sup> alliance, who went on to win the Regional. | ||
| + | |||
| + | :We scored reasonably well in teleop, up to 4 logo pieces per match and always in the desired positions, but clearly could use more practice. There are mechanical and programming issues to resolve prior to the Philadelphia Regional as well. | ||
| + | |||
| + | ===[[DEWBOT VII Philadelphia Regional | Philadelphia Regional]] - 7-9 April=== | ||
| + | |||
| + | :[[Image:DB7_Champ_drive_team_dance_110429_csm_3.jpg|230 px|right|thumb|Dancing Drive Team at Championship - Andrew, Sasha, Siri Maley & Carly]]Team 1640 led the 2<sup>nd</sup> alliance to victory in the Philadelphia Regional Competition. This was 1640 first Regional victory. In fact, this was also our first experience as an Alliance Captain at a Regional Competition.<br> | ||
| + | |||
| + | :We had a great Alliance! Our Alliance Partners Teams 365 (Miracle Workerz), 303 (Panther Robotics) and 2607 (Robo-Vikings, who substituted for 365 after their robot died in the Finals) performed superbly throughout the playoffs.<br> | ||
| + | |||
| + | ===[[DEWBOT VII FRC Championship | FRC Championship]] - 27-30 April, St. Louis=== | ||
| + | |||
| + | :FRC Team 1640 competed for the first time in FRC's Championship, held in the Edward Jones Dome, St. Louis MO. 27 students, mentors and family members made the trip. | ||
| + | |||
| + | :Team 1640 did well, winning 6 and losing 4 of our qualifying matches to place 27<sup>th</sup> out of the 88 teams in Archimedes division. Our drive team was able to score a solid 4 tubes during teleoperated play (except for extreme circumstances) and our minibot ([[DEWBOT VII Minibot#Mighty Mouse|Mighty Mouse]]) was 100% reliable and always placed either 1<sup>st</sup> or 2<sup>nd</sup> in the critical end-game (when deployed). Autonomous performance, alas, was not reliable. We were not selected for an eliminations alliance. | ||
| + | |||
| + | ===Move out of Downingtown Robotics Center - 2<sup>nd</sup> week May=== | ||
| + | :We bid a sad farewell to the Downingtown Robotics Center. Many thanks to the Downingtown Area School District for graciously providing this space to the team during the 2011 build season and for its support over the past 7 years. Alas, the team is homeless for the time being. | ||
| + | <gallery widths=250 heights=250 perrow=3> | ||
| + | Image:DB7_moving_mill_110507_csm.jpg|Molly, Andrew & Ben Kellom maneuvering the mill onto a pallet | ||
| + | Image:DB7_Maley_DB2_110507_csm.jpg|[[User:Siri | Siri Maley]] dismantling [[DEWBOT II]] | ||
| + | Image:DB7_1640_mark_110507_csm.jpg|1640's ''mark'' on the mill pallet | ||
| + | Image:DB7_BenB_Maley_DB2_110507_csm.jpg|Ian, Ben B & [[User:Siri | Siri Maley]] dismantle [[DEWBOT II]] | ||
| + | Image:DB7_tools_on_pallets_110507_csm.jpg|Grinder & Drill Press on Pallet | ||
| + | Image:DB7_mill_moved_110507_csm.jpg|Mill moved | ||
| + | </gallery> | ||
| + | |||
| + | ===Picnic - 12-June-2011=== | ||
| + | :Huge turnout (50 students, mentors & family members) for our annual summer picnic at Marsh Creek Park. | ||
| + | |||
| + | ===[[Team 1640 2011 Summer Program | Summer Program]]=== | ||
| + | |||
| + | ===[[DEWBOT VII Indiana Robotics Invitational|Indiana Robotics Invitational]]=== | ||
| + | :Team sab-BOT-age returned to [[DEWBOT VII Indiana Robotics Invitational|IRI]] with DEWBOT VII. [[DEWBOT VII IRI Matches|Match performance]] was off due to our need to train a new driver ''in-situ'', but we still [[DEWBOT VII IRI Trip Reports|had fun]] and [[DEWBOT VII IRI Post-Mortem|learned]]. For the impatient, go straight to the [[DEWBOT VII IRI Photo Gallery|Photo Gallery]]. | ||
| + | |||
| + | ===Move into Waterloo Gardens Warehouse=== | ||
| + | :On 13-August-2011, we moved into Waterloo Gardens 427 Creamery Way Warehouse. While we expect this stay to be temporary, Wateroo Garden's gracious donation enables us to train a drive team, work on DEWBOT VII, conduct student training and stage for competition. Thanks for the space! | ||
| + | |||
| + | ===i.am.FIRST viewing party=== | ||
| + | :Julie Christopher graciously hosted an i.am.FIRST viewing party on the evening of 14-Aug. The evening started with a pot-luck supper before the viewing. Great company and a great time had by all. 19 participants (Students, Mentors & Family). Thanks, Julie - this was genius! | ||
| + | <gallery widths=250 heights=250 perrow=3> | ||
| + | Image:DB7_iamFIRST_110814_csm-1.jpg|Pot-luck supper before the show | ||
| + | Image:DB7_iamFIRST_110814_csm-2.jpg|Viewing i.am.FIRST | ||
| + | Image:DB7_iamFIRST_110814_csm-3.jpg|Gillian in the groove | ||
| + | </gallery> | ||
| + | |||
| + | ===[[DEWBOT VII Duel on the Delaware | Duel on the Delaware]]=== | ||
| + | :[[image:Duel_on_the_Delaware_revised.jpg|210px|right|thumb]]22-October-2011. Sab-BOT-age's 5<sup>th</sup> time participating at Duel on the Delaware. Also the first FRC competition for 6 new students. | ||
| + | |||
| + | :Despite finishing qualifications at 19<sup>th</sup> out of 28 teams, 4<sup>th</sup>-ranked team 365 ([http://moe365.org/ Miracle Workerz]) seelected us as their first alliance selection, filling out the alliance with team 87. Our alliance went on to win Duel on the Delaware this year. | ||
| + | |||
| + | :Our robot, DEWBOT VII, performed well and reliably though the competition, with a tread replacement being the only significant repair necessary. We were a solid scorer. Our mini-bot (Mighty Mouse) system generally won the end game. On the two occassions when we played defense, we were the defending robot you just couldn't get around. Our scouting is really showing the benefit of the focus we've put on it. Autonomous remains our weak point. | ||
| + | |||
| + | :New driver Andrew and Human Player Douglas both put in excellent performances thoughout the day. | ||
| + | |||
| + | ===[[DEWBOT VII Ramp Riot | Ramp Riot]]=== | ||
| + | :12-November-2011. Due to a late drop-out, FRC Team 1640 had the opportunity to field two robots at Ramp Riot. DEWBOT VII ''Prime'', our competition robot was fielded under the 1640 number by our first drive team. ''Deux'' entered the competition under the ''nom de guerre'' 1641 operated by drive-team trainees, giving them invaluable competition driving experience. We also ran two pits, providing training in this area as well. | ||
| + | |||
| + | :This is the first time Sab-BOT-age had ever run two robots in a competition and thanks go out to all those who worked so hard to bring ''Deux'' from arm-less engineering test bed up to competition condition in the space of one short week. | ||
| + | |||
| + | :1640 was selected by the 3<sup>rd</sup> alliance, comprising teams 103 ([http://www.cybersonics.org Cybersonics]) and 365 ([http://moe365.org/ Miracle Workerz]). A terrific alliance. We won the quarterfinals and our first semifinal match. Alas, 1640's minibot deployment was unreliable throughout the day and 103 broke down in the 2<sup>nd</sup> semifinal match. As a result of these two factors, our alliance was defeated by the 1<sup>st</sup> alliance (2016, 222, 1403), who went on to become champions. | ||
| + | |||
| + | :By a bizzare twist, 1641 was brought into the finals as a replacement robot for 2607. We lost, but ended up as Ramp Riot Finalist. | ||
| + | |||
| + | :1640 has participated in Ramp Riot every year since the team's inception, making this our 7<sup>th</sup> Ramp Riot. | ||
| + | |||
| + | ==Outreach== | ||
| + | ===Downingtown Robotics Center Open House=== | ||
| + | :DAR hosted an [[2010 Open House | Open House]] on the evening of 15-December. | ||
| + | |||
| + | ===[[Uwchlan_Day#2011 | Uwchlan Day]]=== | ||
| + | |||
| + | ==Sub-Teams== | ||
| + | :[[DEWBOT VII Design Team Page | Design Team Page]] | ||
| + | :[[DEWBOT VII Programming Team Page | Programming Team Page]] | ||
| + | :[[DEWBOT VII Chairmans Award]] | ||
| + | |||
| + | == People == | ||
| + | Team Sab-BOT-age is what it is only due to the efforts of the people involved. DEWBOT VII's success will be in the hands of the students, mentors and parents engaged. The team's very existence is possible only through the gracious generosity of our sponsors. | ||
| + | ;:[[DEWBOT VII Students]] | ||
| + | ;:[[DEWBOT VII Mentors]] | ||
| + | ;:[[Sponsors 2011]] | ||
| + | ---- | ||
| + | See our other robots in the [[Robot Archives]]. | ||
| + | [[Category:Robot]][[Category:DEWBOT VII]] | ||
Latest revision as of 05:44, 30 December 2012
The team set two very aggressive goals for 2011:
- Win 1 Regional Event - accomplished at the Philadelphia Regional!
- Attend FRC Championship in St. Louis 27-30 April, 2011 - done
DEWBOT VII was designed to meet the specific challenges posed by FRC's 2011 game: Logomotion.
To help meet these goals, the team did a number of things differently this year:
- A new front-end design process to help us set clear, early strategic objectives and specification was instituted. We piloted this process in December.
- For the first time, team 1640 built two robots: Prime and Deux. Prime goes to the competitions. Deux stays home for driver practice and serves as a software & hardware development platform. Duex also graciously provides spare parts for competitions.
- A (nearly) full-size practice field was set up at the Downingtown Robotics Center, enabling driver practice under realistic conditions.
- Our mill was set up and used almost continuously during build season. The lathe also received more use this year than during the past six. With the help of new mentor Ben Kellom, accuracy became a 1640 hallmark. This year, interchangeable parts really are!
- As 2nd alliance captain, 1640 led this alliance to victory at Philadelphia.
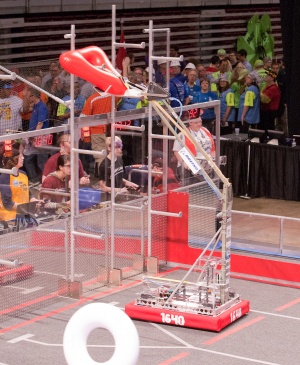 Hanging a red triangle at Philadelphia
Hanging a red triangle at Philadelphia - Received Rockwell Automation's Innovation in Control Award - Also at Philadelphia.
- Participated in the FRC Championship for the first time as a team.
- Were invited to, and participated in the Indiana Robotic Invitational (IRI) for the 2nd consecutive year.
- Champions - Duel on the Delaware
- Finalists - Ramp Riot with 2nd robot & drive team competing under the nom de guerre 1641
- As 2nd alliance captain, 1640 led this alliance to victory at Philadelphia.

Contents
- 1 DEWBOT VII Build
- 2 Design Details
- 3 Events
- 3.1 Baltimore Area Alliance FRC Workshop
- 3.2 Move into Downingtown Robotics Center
- 3.3 Practice Kick-off
- 3.4 CPR Training
- 3.5 Finger Lakes Regional - 3-5 March
- 3.6 Philadelphia Regional - 7-9 April
- 3.7 FRC Championship - 27-30 April, St. Louis
- 3.8 Move out of Downingtown Robotics Center - 2nd week May
- 3.9 Picnic - 12-June-2011
- 3.10 Summer Program
- 3.11 Indiana Robotics Invitational
- 3.12 Move into Waterloo Gardens Warehouse
- 3.13 i.am.FIRST viewing party
- 3.14 Duel on the Delaware
- 3.15 Ramp Riot
- 4 Outreach
- 5 Sub-Teams
- 6 People
DEWBOT VII Build
Build season is the heart of the FRC year. It is the 45 days during which the team's students and mentors put their hearts, minds and hands into designing and building a great robot. Paradoxically, the time seems both far too short and much too long.
Starting with a cold January 8th morning and ending up in the middle of an even colder February night. The chronicles of the DEWBOT VII Build season make interesting reading of how we all band together to perform an almost impossible task of designing, building and testing a robot in such a short time frame. Associated with each weeks build are pictures showing happy (and towards the end, tired) roboteers and mentors hard at work.
Design Details

CAD Design
Drive Train
- Following an long and animated debate on the evening of January 10th 2011, the team decided to use a Pivot drive-train on DEWBOT VII, rather than 6WD Tank. The final vote was 7 to 2.
- Pivot drive provides our drivers with the combination of extraordinary agility and maneuverability with power and traction. It is like combining the best attributes of the two most common FRC drive-trains, Mecanum and 6WD Tank, together in one robot.
- The balance is cost and resource management. Sab-BOT-age's Pivot Drive design controls the steering and drive for all four wheels independently through software. This makes for an extremely flexible drive systems (think fly-by-wire), but uses eight motors, eight motor controllers, a fair amount of the cRIO's processing capability, a lot of complex control software and a very large number of precision machined parts. It's not your Grandmother's robot drive-train. The team pioneered this drive-train in 2010, receiving the Xerox Creativity and (BR)2 Engineering Excellence Awards for the design & execution.
- In the end, the drivers and programmers were the most persuasive and adamant champions of Pivot Drive. Chief Driver Carly was unwilling to give up a drive-train which provided the team with a critical competitive advantage in 2010 and appeared to offer the same in this year's game. The programming team was equally clear that they were up to the software challenge.
- The 2011 Pivot Drive benefits from a Value Engineering program the Team conducted during October & November of last year, and incorporates significant improvements.
Mechanical Scoring
- Scoring is defined in the 2011 Game Manual. We made an Excel interface that calculates the autonomous, teleoperated, and minibot race scores to help us determine strategy.


- From a mechanical standpoint, there are two distinct scoring systems:
- A system to hang Ubertubes (in autonomous) and Logo Pieces (in teleop) on the Scoring Grid, and to collect Logo Pieces from the Human Players or pick them off the floor (The Arm); and
- A Minibot with its deployment system for scoring bonus points during the end game.
- The key strategic imperatives for the mechanical scoring systems were:
- The ability to quickly & reliably score Ubertubes and Logo Pieces on the top row of the scoring grid;
- Reliable deployment of a reliable minibot is essential;
- We need to signal Logo Piece needs to the Human players;
- The minibot & deployment should be fast (this is a race, after all); and
- We should be able to quickly and reliably score on all rows of the scoring grid.
Autonomous

- Preliminary analysis of autonomous mode scenarios:
- Autonomous scoring is essential (top row);
- The area in front of the scoring grid will become congested during autonomous; there is a premium for being the third robot on an alliance which can score autonomously (without colliding with alliance partners);
- Contingency #2 ("Dead Reckoning") is deemed not possible due to the inability of the drive train to drive straight on its own (i.e. without sensor or human correction).
- Edge following is desirable for the branching scenarios.
Mass
At Finger lakes, DEWBOT VII's mass at reinspection for play-offs was 113.4 lbm (127.5 lbm with Bumpers - 14.2 lbm for the 2nd set of Bumpers - no-one paid attention during initial inspection).
By Philadelphia, modifications increased DEWBOT VII's mass to 117.9 lbm at final weigh-in (117.8 lbm at the initial inspection). 13.8 lbm for one set of bumpers; 14.1 lbm for the other.
Drive / Tactical
Click here to enter Drive Team Page. Contains robot control information and player information.
Strategy/Scouting
View from the Front, View from the Top - what the field looks like in play, 28 Jan 11
Minibot Deployment Tactics - technical & non-technical minibot deployment considerations, 23 Jan 11
Strategic Analysis - potential strategies as well as what others are likely to do, 27 Feb 11
Events
Baltimore Area Alliance FRC Workshop
- 6-November-2010. Very helpful and educational. Our thanks to the BAA for their gracious invitation. (6) attended from 1640.
Move into Downingtown Robotics Center
- In November, Downingtown Area Robotics moved from the Micklen Building into a 17,000 ft2 warehouse at 320 Boot Road, Downingtown. This is a great space for robotics, allowing a full-scale practice field. Alas, no sense of permanence. Our 6th home (and by-far very best to-date).

Carly, Selina & Garrison organize our workspace within the Downingtown Robotics Center

Power tool alley

Storage closet



Practice Kick-off
- Team 1640 conducted a Practice Kick-off on 11 & 12-December 2010 in preparation of the real deal. A formal Design Process was introduced and tested during this exercise. 2006 Aim High game rules were employed for the robot basis, with the exception of the control system, which utilized 2010 standards.

- Game simulation using students as robots proved very effective and provided very good insights into the game play and requirements for winning matches.
- As always, the most difficult part of strategic decision making was in deciding which options not to pursue. Need to work on this.
CPR Training
- Nine students, mentors and parents from Team 1640 received CPR training and 2-year ASHI certification on 18-Dec at the Uwchlan Ambulance Corps.
Finger Lakes Regional - 3-5 March
- The team had a rough start, with some cRIO problems which took a while to resolve. In the end, however, we were selected for the 4th alliance and made it to the semifinals. We were defeated by the 1st alliance, who went on to win the Regional.
- We scored reasonably well in teleop, up to 4 logo pieces per match and always in the desired positions, but clearly could use more practice. There are mechanical and programming issues to resolve prior to the Philadelphia Regional as well.
Philadelphia Regional - 7-9 April
- Team 1640 led the 2nd alliance to victory in the Philadelphia Regional Competition. This was 1640 first Regional victory. In fact, this was also our first experience as an Alliance Captain at a Regional Competition.

- We had a great Alliance! Our Alliance Partners Teams 365 (Miracle Workerz), 303 (Panther Robotics) and 2607 (Robo-Vikings, who substituted for 365 after their robot died in the Finals) performed superbly throughout the playoffs.
FRC Championship - 27-30 April, St. Louis
- FRC Team 1640 competed for the first time in FRC's Championship, held in the Edward Jones Dome, St. Louis MO. 27 students, mentors and family members made the trip.
- Team 1640 did well, winning 6 and losing 4 of our qualifying matches to place 27th out of the 88 teams in Archimedes division. Our drive team was able to score a solid 4 tubes during teleoperated play (except for extreme circumstances) and our minibot (Mighty Mouse) was 100% reliable and always placed either 1st or 2nd in the critical end-game (when deployed). Autonomous performance, alas, was not reliable. We were not selected for an eliminations alliance.
Move out of Downingtown Robotics Center - 2nd week May
- We bid a sad farewell to the Downingtown Robotics Center. Many thanks to the Downingtown Area School District for graciously providing this space to the team during the 2011 build season and for its support over the past 7 years. Alas, the team is homeless for the time being.

Molly, Andrew & Ben Kellom maneuvering the mill onto a pallet

Siri Maley dismantling DEWBOT II

1640's mark on the mill pallet

Ian, Ben B & Siri Maley dismantle DEWBOT II

Grinder & Drill Press on Pallet

Mill moved






Picnic - 12-June-2011
- Huge turnout (50 students, mentors & family members) for our annual summer picnic at Marsh Creek Park.
Summer Program
Indiana Robotics Invitational
- Team sab-BOT-age returned to IRI with DEWBOT VII. Match performance was off due to our need to train a new driver in-situ, but we still had fun and learned. For the impatient, go straight to the Photo Gallery.
Move into Waterloo Gardens Warehouse
- On 13-August-2011, we moved into Waterloo Gardens 427 Creamery Way Warehouse. While we expect this stay to be temporary, Wateroo Garden's gracious donation enables us to train a drive team, work on DEWBOT VII, conduct student training and stage for competition. Thanks for the space!
i.am.FIRST viewing party
- Julie Christopher graciously hosted an i.am.FIRST viewing party on the evening of 14-Aug. The evening started with a pot-luck supper before the viewing. Great company and a great time had by all. 19 participants (Students, Mentors & Family). Thanks, Julie - this was genius!

Pot-luck supper before the show

Viewing i.am.FIRST

Gillian in the groove



Duel on the Delaware
- 22-October-2011. Sab-BOT-age's 5th time participating at Duel on the Delaware. Also the first FRC competition for 6 new students.

- Despite finishing qualifications at 19th out of 28 teams, 4th-ranked team 365 (Miracle Workerz) seelected us as their first alliance selection, filling out the alliance with team 87. Our alliance went on to win Duel on the Delaware this year.
- Our robot, DEWBOT VII, performed well and reliably though the competition, with a tread replacement being the only significant repair necessary. We were a solid scorer. Our mini-bot (Mighty Mouse) system generally won the end game. On the two occassions when we played defense, we were the defending robot you just couldn't get around. Our scouting is really showing the benefit of the focus we've put on it. Autonomous remains our weak point.
- New driver Andrew and Human Player Douglas both put in excellent performances thoughout the day.
Ramp Riot
- 12-November-2011. Due to a late drop-out, FRC Team 1640 had the opportunity to field two robots at Ramp Riot. DEWBOT VII Prime, our competition robot was fielded under the 1640 number by our first drive team. Deux entered the competition under the nom de guerre 1641 operated by drive-team trainees, giving them invaluable competition driving experience. We also ran two pits, providing training in this area as well.
- This is the first time Sab-BOT-age had ever run two robots in a competition and thanks go out to all those who worked so hard to bring Deux from arm-less engineering test bed up to competition condition in the space of one short week.
- 1640 was selected by the 3rd alliance, comprising teams 103 (Cybersonics) and 365 (Miracle Workerz). A terrific alliance. We won the quarterfinals and our first semifinal match. Alas, 1640's minibot deployment was unreliable throughout the day and 103 broke down in the 2nd semifinal match. As a result of these two factors, our alliance was defeated by the 1st alliance (2016, 222, 1403), who went on to become champions.
- By a bizzare twist, 1641 was brought into the finals as a replacement robot for 2607. We lost, but ended up as Ramp Riot Finalist.
- 1640 has participated in Ramp Riot every year since the team's inception, making this our 7th Ramp Riot.
Outreach
Downingtown Robotics Center Open House
- DAR hosted an Open House on the evening of 15-December.
Uwchlan Day
Sub-Teams
People
Team Sab-BOT-age is what it is only due to the efforts of the people involved. DEWBOT VII's success will be in the hands of the students, mentors and parents engaged. The team's very existence is possible only through the gracious generosity of our sponsors.
See our other robots in the Robot Archives.